Ang isang circuit na nagbibigay-daan sa isang gumagamit na linear na makontrol ang bilis ng isang konektadong motor sa pamamagitan ng pag-ikot ng isang nakakabit na potensyomiter ay tinatawag na circuit ng motor speed controller.
3 madaling bumuo ng mga circuit circuit ng bilis para sa mga motor ng DC ay ipinakita dito, isa gamit ang MOSFET IRF540, pangalawa gamit ang IC 555 at ang pangatlong konsepto na may IC 556 na nagtatampok ng pagpoproseso ng metalikang kuwintas.
Disenyo # 1: Batay sa Mosfet na DC Motor Speed Controller
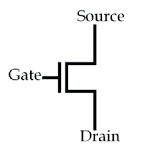
Ang isang napaka-cool at madali DC motor speed controller circuit ay maaaring bumuo gamit ang isang solong mosfet, isang risistor, at isang palayok, tulad ng ipinakita sa ibaba:

Paggamit ng isang BJT Emitter Follower

Tulad ng nakikita na ang mosfet ay rigged bilang isang tagasunod sa mapagkukunan o isang karaniwang mode ng alisan ng tubig, upang matuto nang higit pa tungkol sa pagsasaayos na ito maaari mong sumangguni sa post na ito , na tumatalakay sa isang bersyon ng BJT, gayunpaman ang prinsipyo ng pagtatrabaho ay nananatiling pareho.
Sa disenyo ng DC motor controller sa itaas, ang pag-aayos ng palayok ay lumilikha ng magkakaibang potensyal na pagkakaiba sa gate ng mosfet, at ang pin na pinagmulan ng mosfet ay sumusunod lamang sa halaga ng potensyal na pagkakaiba na ito at inaayos ang boltahe sa motor.
Ipinapahiwatig nito na ang mapagkukunan ay palaging 4 o 5V na nahuhuli sa likod ng boltahe ng gate at nag-iiba / pababa sa pagkakaiba na ito, na nagpapakita ng magkakaibang boltahe sa pagitan ng 2V at 7V sa buong motor.
Kapag ang boltahe ng gate ay nasa paligid ng 7V, ang pin na mapagkukunan ay magbibigay ng minimum na 2V sa motor na nagdudulot ng isang napakabagal na pagikot sa motor, at ang 7V ay magagamit sa kabuuan ng pin na mapagkukunan kapag ang pagsasaayos ng palayok ay bumubuo ng buong 12V sa gate ng mosfet
Dito maaari nating malinaw na makita na ang pin na pinagmulan ng mosfet ay tila 'sumusunod' sa gate at samakatuwid ang tagasunod ng pinagmulan ng pangalan.
Nangyayari ito dahil ang pagkakaiba sa pagitan ng gate at ng pin na pinagmulan ng mosfet ay dapat na palaging nasa paligid ng 5V, upang paganahin ang mosfet na mahusay na magsagawa.
Gayunpaman, makakatulong ang pagsasaayos sa itaas upang ipatupad ang isang makinis na kontrol sa bilis sa motor, at ang disenyo ay maaaring mabuo nang medyo mura.
Ang isang BJT ay maaari ding gamitin bilang kapalit ng mosfet, at sa katunayan ang isang BJT ay makakagawa ng isang mas mataas na saklaw ng kontrol ng tungkol sa 1V hanggang 12V sa buong motor.
Video Demo
https://youtu.be/W762NTuQ19gPagdating sa pagkontrol ng bilis ng motor nang pantay at mahusay, ang isang PWM based controller ay naging perpektong pagpipilian, dito matututunan natin ang higit pa, tungkol sa isang simpleng circuit upang ipatupad ang operasyong ito.
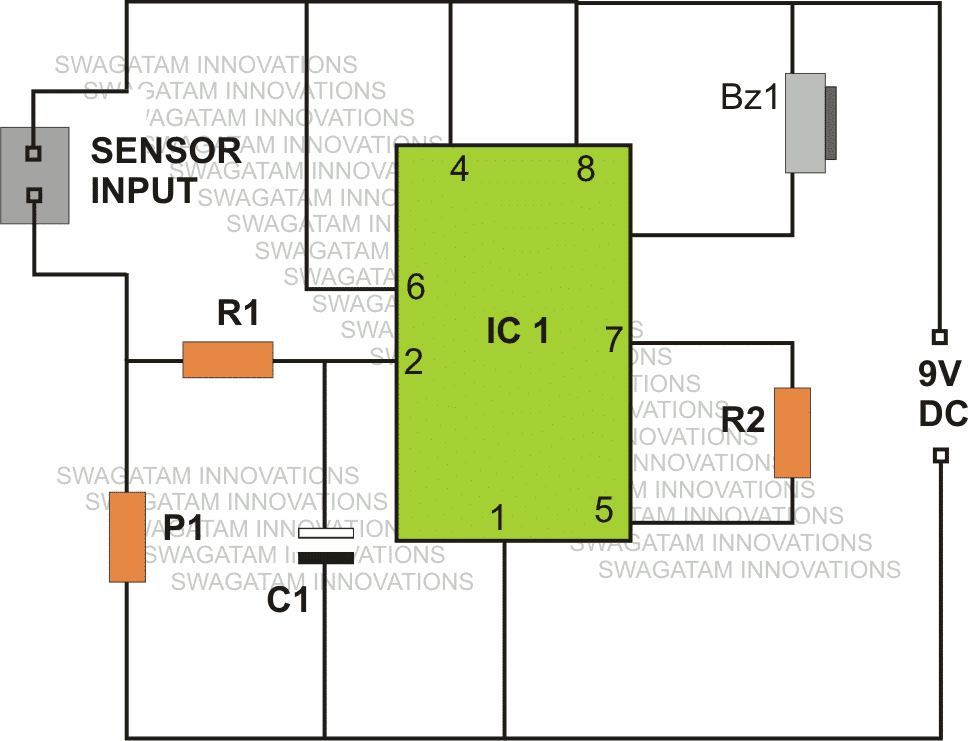
Disenyo # 2: Control ng PWM DC Motor na may IC 555
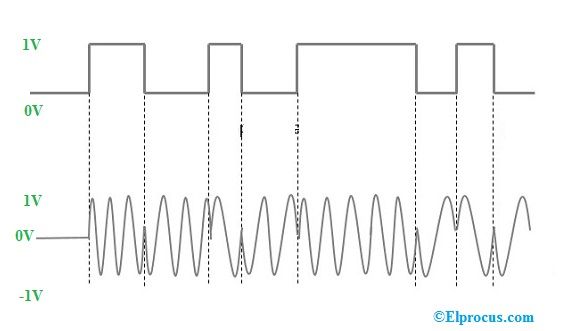
Ang disenyo ng isang simpleng motor speed controller na gumagamit ng PWM ay maaaring maunawaan tulad ng sumusunod:
Pauna kapag pinapagana ang circuit, ang trigger pin ay nasa isang mababang posisyon ng lohika dahil ang capacitor C1 ay hindi sisingilin.
Ang mga kundisyon sa itaas ay pinasimulan ang ikot ng oscillation, na ginagawang mataas ang output sa isang lohika na mataas.
Ang isang mataas na output ngayon ay pinipilit ang capacitor na singilin sa pamamagitan ng D2.
Sa pag-abot sa antas ng boltahe na 2/3 ng supply, i-pin ang # 6 na kung saan ang threshold ng mga pag-trigger ng IC.
Ang sandali na pin # 6 ay nagti-trigger, pin # 3 at pin # 7 ay bumalik sa mababang lohika.
Sa pin # 3 sa mababang, ang C1 ay muling nagsisimulang paglabas sa pamamagitan ng D1, at kapag ang boltahe sa kabuuan ng C1 ay nahuhulog sa ibaba ng antas na 1/3 ng supply boltahe, ang pin # 3 at pin # 7 muli ay naging mataas, na nagiging sanhi ng pagsunod sa ikot at magpatuloy sa pag-uulit.
Ito ay kagiliw-giliw na tandaan na, ang C1 ay may dalawang diskretong nagtakda ng mga landas para sa proseso ng pagsingil at paglabas sa pamamagitan ng mga diode D1, D2 at sa pamamagitan ng mga armas ng paglaban na itinakda ng palayok ayon sa pagkakabanggit.
Nangangahulugan ito na ang kabuuan ng mga resistensya na nakatagpo ng C1 habang ang pagsingil at paglabas ay nananatiling pareho gaano man itakda ang palayok, samakatuwid ang haba ng daluyong ng out put pulse ay laging nananatiling pareho.
Gayunpaman, dahil ang pagsingil o ang pagpapalabas ng mga tagal ng oras ay nakasalalay sa halaga ng paglaban na nakasalubong sa kanilang mga landas, ang palayok ay mabait na nagtatakda ng mga panahong ito ayon sa mga pagsasaayos nito.
Dahil ang mga tagal ng pagsingil at pagtatapos ng oras ay direktang konektado sa output cycle ng tungkulin, nag-iiba ito ayon sa pagsasaayos ng palayok, na nagbibigay ng form sa inilaan na magkakaibang mga pulso ng PWM sa output.
Ang average na resulta ng marka / ratio ng espasyo ay nagbibigay ng pagtaas sa output ng PWM na kung saan ay kinokontrol ang bilis ng DC ng motor.
Ang mga pulso ng PWM ay pinakain sa gate ng isang mosfet na tumutugon at kinokontrol ang nakakonektang kasalukuyang motor bilang tugon sa setting ng palayok.
Ang kasalukuyang antas sa pamamagitan ng motor ay nagpapasya na ito ay mabilis at sa gayon ay nagpapatupad ng pagkontrol ng epekto sa pamamagitan ng palayok.
Ang dalas ng output mula sa IC ay maaaring makalkula sa pormula:
F = 1.44 (VR1 * C1)
Ang mosfet ay maaaring mapili ayon sa kinakailangan o kasalukuyang pag-load.
Ang circuit diagram ng ipinanukalang DC motor speed controller ay makikita sa ibaba:

Prototype:

Katunayan sa Pagsubok ng Video:
https://youtu.be/M-F7MWcSiFYSa itaas na video clip maaari nating makita kung paano ginagamit ang disenyo ng batay sa IC 555 para sa pagkontrol ng bilis ng isang DC motor. Tulad ng nasaksihan mo, kahit na perpektong gumagana ang bombilya bilang tugon sa mga PWM at nag-iiba ang tindi nito mula sa minimum na glow hanggang sa maximum na mababa, ang motor ay hindi.
Ang motor sa una ay hindi tumutugon sa makitid na PWMs, sa halip ay nagsisimula sa isang haltak pagkatapos na ang mga PWM ay naayos sa makabuluhang mas mataas na mga lapad ng pulso.
Hindi ito nangangahulugang ang circuit ay may mga problema, ito ay dahil ang DC motor armature ay gaganapin sa pagitan ng isang pares ng mga magnet na mahigpit. Upang simulan ang isang pagsisimula ang armature ay kailangang tumalon sa pag-ikot nito sa dalawang poste ng pang-akit na hindi maaaring mangyari sa isang mabagal at banayad na paggalaw. Kailangan itong magpasimula sa isang tulak.
Iyon mismo kung bakit ang motor ay paunang nangangailangan ng isang mas mataas na mga pagsasaayos para sa PWM at sa sandaling ang pag-ikot ay pinasimulan ang armature ay nakakakuha ng ilang lakas na gumagalaw at ngayon makamit ang mas mabagal na bilis ay magagawa sa pamamagitan ng mas makitid na PWMs.
Gayunpaman, ang pagkuha ng pag-ikot sa isang bahagyang gumagalaw na mabagal na katayuan ay maaaring imposible dahil sa parehong dahilan tulad ng ipinaliwanag sa itaas.
Sinubukan ko ang aking makakaya upang mapagbuti ang tugon at makamit ang isang pinakamabagal na posibleng kontrol ng PWM sa pamamagitan ng paggawa ng ilang mga pagbabago sa unang diagram tulad ng ipinakita sa ibaba:

Nasabi ito, ang motor ay maaaring magpakita ng isang mas mahusay na kontrol sa mas mabagal na antas kung ang motor ay nakakabit o na-strap sa isang pagkarga sa pamamagitan ng mga gears o pulley system.
Maaaring mangyari ito sapagkat ang pagkarga ay kikilos bilang isang pamamasa at makakatulong upang magbigay ng isang kinokontrol na kilusan sa panahon ng mas mabagal na pagsasaayos ng bilis.
Disenyo # 3: Paggamit ng IC 556 para sa Pinahusay na Pagkontrol sa Bilis
Nag-iiba-iba ang isang bilis ng motor ng DC maaaring lumitaw na hindi napakahirap at maaari kang makahanap ng maraming mga circuit para dito.
Gayunpaman ang mga circuit na ito ay hindi ginagarantiyahan ang mga pare-parehong antas ng metalikang kuwintas sa mas mababang bilis ng motor, na ginagawang medyo hindi epektibo ang paggana.
Bukod dito sa napakababang bilis dahil sa hindi sapat na metalikang kuwintas, ang motor ay may gawi na huminto.
Ang isa pang seryosong sagabal ay iyon, walang tampok na pag-reverse ng motor na kasama sa mga circuit na ito.
Ang ipinanukalang circuit ay ganap na malaya mula sa mga pagkukulang sa itaas at nagawang makabuo at mapanatili ang mataas na antas ng metalikang kuwintas kahit sa pinakamababang posibleng bilis.
Pagpapatakbo ng Circuit
Bago namin talakayin ang iminungkahing PWM motor controller circuit, nais din naming malaman ang mas simpleng kahalili na hindi gaanong mabisa. Gayunpaman, maaari itong maituring na makatuwirang mabuti hangga't ang pag-load sa motor ay hindi mataas, at hangga't ang bilis ay hindi mabawasan sa pinakamaliit na antas.
Ipinapakita ng pigura kung paano maaaring magamit ang isang solong 556 IC para sa pagkontrol ng bilis ng isang konektadong motor, hindi namin bibigyan ang mga detalye, ang tanging kapansin-pansin na disbentaha ng pagsasaayos na ito ay ang torque ay direktang proporsyonal sa bilis ng motor.
Bumabalik sa iminungkahing mataas na disenyo ng circuit ng Controller ng bilis ng metalikang kuwintas, dito nagamit namin ang dalawang 555 ICs sa halip na isa o sa halip isang solong IC 556 na naglalaman ng dalawang 555 ICs sa isang pakete.
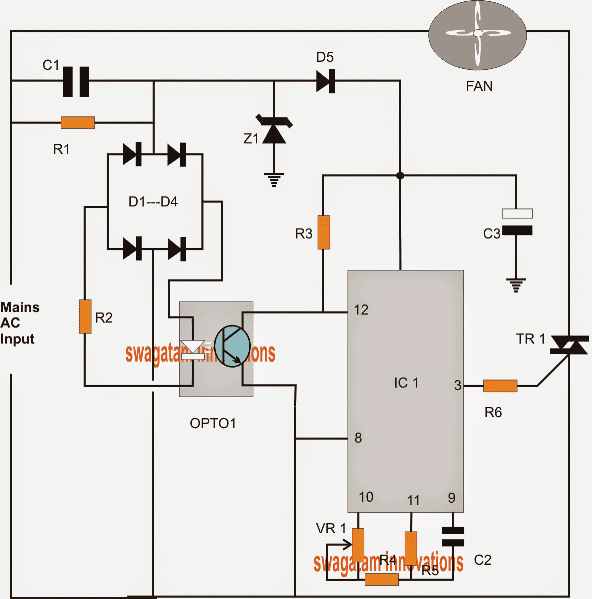
Diagram ng Circuit

Pangunahing Mga Tampok
Maikling panukala DC motor controller may kasamang mga sumusunod na kagiliw-giliw na tampok:
Ang bilis ay maaaring iba-iba ng tuloy-tuloy mula sa zero hanggang sa maximum, nang hindi huminto.
Ang metalikang kuwintas ay hindi kailanman apektado ng mga antas ng bilis at mananatiling pare-pareho kahit sa minimum na antas ng bilis.
Ang pag-ikot ng motor ay maaaring baligtarin o baligtarin sa loob ng isang maliit na bahagi ng segundo.
Ang bilis ay variable sa parehong direksyon ng pag-ikot ng motor.
Ang dalawa 555 ICs ay nakatalaga na may dalawang magkakahiwalay na pag-andar. Ang isang seksyon ay na-configure bilang isang astable multivibrator na bumubuo ng 100 Hz square wave na orasan na pinakain sa naunang 555 na seksyon sa loob ng pakete.
Ang dalas sa itaas ay responsable para sa pagtukoy ng dalas ng PWM.
Ang transistor BC 557 ay ginagamit bilang isang pare-pareho na kasalukuyang mapagkukunan na pinapanatili ang magkadugtong na kapasitor sa collector arm nito na sisingilin.
Bumubuo ito ng isang boltahe ng ngga ngipin sa kabuuan ng capacitor sa itaas, na kung saan ay inihambing sa loob ng 556 IC na may sample na boltahe na inilapat sa labas sa ipinakitang pin-out.
Ang sample na boltahe ay nalalapat sa labas ay maaaring makuha mula sa isang simpleng 0-12V variable voltage power supply circuit.
Ang iba't ibang boltahe na inilapat sa 556 IC ay ginagamit upang ibahin ang PWM ng mga pulso sa output at kung saan sa huli ay ginagamit para sa mabilis na regulasyon ng nakakonektang motor.
Ginagamit ang switch S1 upang agad na baligtarin ang direksyon ng motor tuwing kinakailangan.
Listahan ng Mga Bahagi
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 Ohms,
- R7, R8, R9, R10 = 470 Ohms,
- C1 = 0.1uF,
- C2, C3 = 0.01uF,
- C4 = 1uF / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC547,
- D1 --- D4 = 1N5408,
- Z1 = 4V7 400mW
- IC1 = 556,
- S1 = switch ng toggle ng SPDT
Ang circuit sa itaas ay inspirasyon mula sa sumusunod na circuit ng driver ng motor na na-publish pabalik sa elecktor electronic India magazine.
Pagkontrol sa Motor Torque gamit ang IC 555

Ang unang diagram ng pagkontrol ng motor ay maaaring gawing mas simple sa pamamagitan ng paggamit ng isang switch ng DPDT para sa operasyon ng pag-reverse ng motor, at sa pamamagitan ng paggamit ng isang emitter na tagasunod na transistor para sa pagpapatupad ng kontrol sa bilis, tulad ng ipinakita sa ibaba:

Precision Motor Control gamit ang isang Single Op Amp
Isang labis na pino o masalimuot na kontrol sa isang d.c. ang motor ay maaaring makamit ang paggamit ng isang op-amp at isang tacho-generator. Ang op-amp ay pinalaki bilang isang boltahe na sensitibong switch. Sa circuit na ipinakita sa ibaba, sa sandaling ang output ng tacho-generator ay mas mababa kaysa sa preset na boltahe ng sanggunian ang switching transistor ay naka-ON at 100% na kapangyarihan ay ibibigay sa motor.
Ang paglipat ng aksyon ng op amp ay magaganap sa loob lamang ng ilang millivolts sa paligid ng boltahe ng sanggunian. Kakailanganin mo ang isang dalawahang supply ng kuryente, na maaaring maging stabilize lamang ng zener.

Nagbibigay-daan ang motor control na ito sa walang katapusang naaakma na saklaw nang hindi nagsasangkot ng anumang anyo ng mga mekanikal na abala.
Ang output ng op amp ay +/- 10% lamang ng antas ng mga riles ng supply, sa gayon ay gumagamit ng isang tagasunod na dobleng tagasunod na malaking bilis ng motor ay maaaring makontrol.
Ang boltahe ng sanggunian ay maaaring maayos sa pamamagitan ng mga thermistor, o isang LDR atbp. Ang pang-eksperimentong set up na ipinahiwatig sa circuit diagram na ginawang paggamit ng isang RCA 3047A op amp, at isang 0.25W 6V motor bilang tacho-generator na nakabuo sa paligid ng 4V sa 13000 rpm para sa ang inilaan na puna.
Nakaraan: 3 Pinakamahusay na Mga Circuits ng Magnanakaw ng Joule Susunod: Pressure Cooker Whistle Counter Circuit