Ang artikulong ipinakita dito ay nagpapaliwanag ng isang napaka-simpleng closed loop AC motor speed controller circuit na maaaring magamit para sa pagkontrol ng solong yugto ng bilis ng AC motor.
Ang circuit ay napaka-mura at gumagamit ng ordinaryong mga elektronikong sangkap para sa kinakailangang pagpapatupad. Ang pangunahing tampok ng circuit ay ito ay isang saradong uri ng loop, nangangahulugan iyon na ang bilis o ang metalikang kuwintas ng motor ay hindi maaaring maapektuhan ng pagkarga o ng bilis ng motor sa circuit na ito, sa kabaligtaran ang metalikang kuwintas ay hindi tuwirang katimbang sa ang laki ng bilis.
Operasyon ng Circuit:
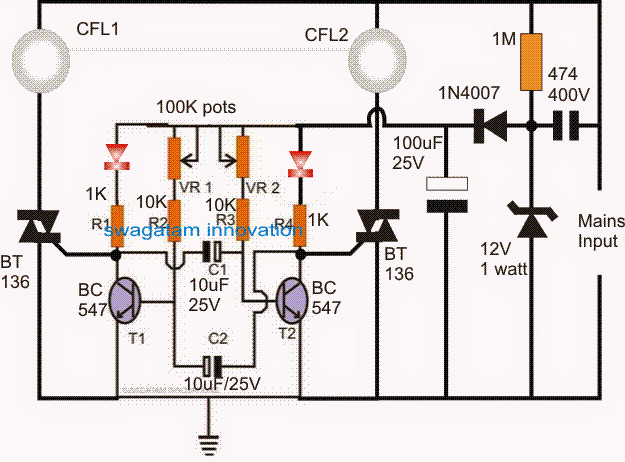
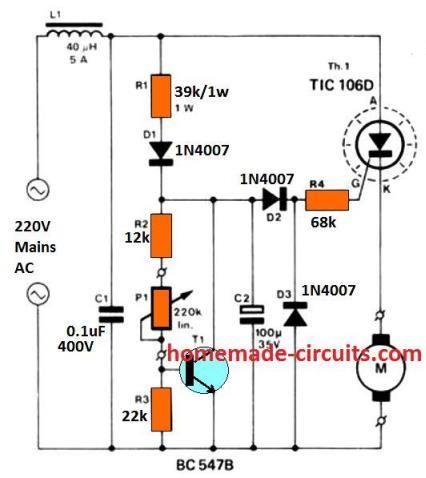
Sumangguni sa circuit diagram ng ipinanukalang solong yugto ng closed loop AC motor controller, ang mga kasangkot na operasyon ay maaaring maunawaan sa pamamagitan ng mga sumusunod na puntos:
Para sa positibong kalahating siklo ng input AC, ang capacitor C2 ay sisingilin sa pamamagitan ng risistor R1 at sa diode D1.

Ang pagsingil ng C2 ay nagpatuloy hanggang ang boltahe sa capacitor na ito ay magiging katumbas ng simulate boltahe ng zener ng pagsasaayos.
Ang circuit wired sa paligid ng transistor T1 ay epektibo na simulate ang pagpapatakbo ng isang zener diode.
Ang pagsasama ng palayok na P1 ay ginagawang posible upang ayusin ang boltahe ng 'zener diode' na ito. Tiyak na pagsasalita, ang boltahe na nabuo sa kabuuan ng T1 ay literal na natutukoy ng ratio sa pagitan ng resistors R3 at R2 + P1.
Ang boltahe sa kabuuan ng risistor R4 ay laging pinananatili na katumbas ng 0.6 volts na katumbas ng kinakailangang boltahe sa pagsasagawa ng batayang emitor ng T1 na base.
Samakatuwid nangangahulugan ito na ang ipinaliwanag sa itaas na zener boltahe ay dapat na katumbas ng halagang maaaring makuha sa pamamagitan ng paglutas ng ekspresyon:
(P1 + R2 + R3 / R3) × 0.6
Listahan ng Mga Bahagi para sa itaas na saradong loop AC motor speed circuit circuit
- R1 = 39K,
- R2 = 12K,
- R3 = 22K,
- R4 = 68K,
- P1 = 220K,
- Lahat ng mga diode = 1N4007,
- C1 = 0.1 / 400V,
- C2 = 100uF / 35V,
- T1 = BC547B,
- SCR = C106
- L1 = 30 liko ng 25 SWG wire sa isang 3mm ferrite rod o 40 uH / 5 watt
Paano Nakaposisyon ang Load para sa isang Espesyal na Dahilan
Ang isang maingat na pagsisiyasat ay nagpapakita na ang motor o ang pagkarga ay hindi ipinakilala sa karaniwang posisyon sa halip ito ay naka-wire pagkatapos lamang ng SCR, sa cathode nito.
Ito ay sanhi ng isang kagiliw-giliw na tampok na ipinakilala sa circuit na ito.
Ang espesyal na posisyon ng motor sa itaas ay ginagawang oras ng pagpapaputok ng SCR sa potensyal na pagkakaiba sa pagitan ng likod na EMF ng motor at ng 'zener voltage' ng circuit.
Nangangahulugan lamang iyon na mas maraming load ang motor, mas mabilis ang sunog ng SCR.
Ang pamamaraan ay lubos na gayahin ang isang sarado na uri ng loop ng paggana kung saan ang feedback ay natanggap sa anyo ng likod EMF na nabuo ng motor mismo.
Gayunpaman ang circuit ay nauugnay sa isang bahagyang sagabal. Ang pag-aampon ng isang SCR ay nangangahulugang ang circuit ay maaaring hawakan lamang 180 degree ng phase control at ang motor ay hindi maaaring kontrolin sa buong saklaw ng bilis ngunit para lamang sa 50% nito.
Ang isa pang kawalan na nauugnay dahil sa murang likas na katangian ng circuit ay ang motor na may kaugaliang makagawa ng mga hiccup sa mas mababang bilis, subalit habang ang bilis ay nadagdagan ang isyung ito ay ganap na nawala.
Ang Pag-andar ng L1 at C1
Ang L1 at C1 ay kasama para sa pagsuri sa mataas na dalas ng RF na nabuo dahil sa mabilis na pagpuputol ng phase ng SCR.
Kailangan ng mas kaunti upang masabi na ang aparato (SCR) ay dapat na naka-mount sa isang angkop na heatsink para sa pinakamainam na mga resulta.
Bumalik EMF Drill Speed Controller Circuit
Pangunahin na ginagamit ang circuit na ito upang makontrol ang matatag na bilis ng mas maliit na mga motor na sugat sa serye, tulad ng matatagpuan sa maraming mga electric drill ng kamay, atbp. Ang metalikang kuwintas at ang bilis ay kinokontrol ng P1 potentiometer. Ang pagsasaayos ng potensyomiter na ito ay tumutukoy kung gaano maikaka-trigger ang triac.

Kapag ang bilis ng motor ay bumaba sa ilalim lamang ng preset na halaga (may koneksyon sa pagkarga), pagkatapos ay bumababa ang likod ng motor na EMF. Bilang isang resulta, ang boltahe sa paligid ng R1, P1, at C5 ay tumataas upang ang triac ay naaktibo nang mas maaga at ang bilis ng motor ay may posibilidad na tumaas. Ang isang tiyak na proporsyon ng katatagan ng bilis ay nakakamit sa ganitong paraan.
Nakaraan: Paano Bumuo ng Elektrisidad mula sa Tubig sa Dagat - 2 Mga Simpleng Paraan Susunod: GSM Batay sa Cell Phone Remote Control Switch Circuit