Ipinapaliwanag ng post ang isang DC Motor Controller na nagtatampok ng isang pare-pareho na kompensasyon ng metalikang kuwintas para sa pagpapagana ng motor na tumakbo sa isang pare-parehong bilis anuman ang karga sa ito.
Kakulangan ng Karaniwang Mga Controller ng Bilis
Isang sagabal ng karamihan ng simpleng mga tagakontrol ng bilis ibibigay lamang nila ang motor na may paunang natukoy na pare-pareho na boltahe. Bilang isang resulta ang bilis ay hindi mananatiling pare-pareho at nag-iiba sa pag-load sa motor, dahil sa kawalan ng kompensasyon ng metalikang kuwintas.
Halimbawa sa isang modelo ng tren, na may simpleng mga kontroler ang bilis ng tren ay unti-unting bumababa para sa mga akyat na gradient at nagpapabilis habang papunta sa pababa.
Samakatuwid para sa modelo ng tren ang pagsasaayos ng palayok sa palayok upang mapanatili ang isang napiling bilis ng motor gayun din ay lumihis depende sa pagkarga ng engine na maaaring nakakaakit.
Ang pare-parehong metalikang kuwintas ng motor circuit circuit na ipinaliwanag sa artikulong ito ay nakakakuha ng isyung ito sa pamamagitan ng pagsubaybay sa bilis ng motor at panatilihin itong pare-pareho para sa isang paunang natukoy na setting ng kontrol, hindi mahalaga kung ano ang maaaring maging karga sa motor.
Ang circuit ay maaaring mailapat sa karamihan ng mga modelo na gumagamit ng isang DC permanenteng magnet motor.
Kinakalkula ang Back EMF Factor
Ang boltahe sa kabila ng mga terminal ng motor ay binubuo ng isang pares ng mga kadahilanan, sa likod e.m.f. ginawa ng motor, at ang boltahe ay bumaba sa paglaban ng armature.
Ang likuran e.m.f. nabuo ng motor paikot-ikot ay karaniwang proporsyonal sa bilis ng motor, na nangangahulugan na ang bilis ng motor ay maaaring subaybayan sa pamamagitan ng pagsukat ng likod ng emf nilalaman. Ngunit, ang pangunahing isyu ay upang ihiwalay at tuklasin ang likod e.m.f. mula sa boltahe ng paglaban ng armature.
Kung palagay ang isang hiwalay na risistor ay nakakabit sa serye gamit ang motor pagkatapos, isinasaalang-alang na ang isang karaniwang solong kasalukuyang dumadaan sa risistor na ito at din sa pamamagitan ng paglaban ng armature, ang pagbagsak ng boltahe sa dalawang mga resistors ng serye ay maaaring katumbas ng pagbaba sa paglaban ng armature.
Sa totoo lang, maaari itong ipalagay na kapag ang dalawang halaga ng paglaban ay magkapareho pagkatapos ang dalawang lakas ng boltahe sa bawat isa sa mga resistors ay magkatulad din. Sa data na ito, maaaring posible na ibawas ang drop ng boltahe ng R3 mula sa boltahe ng motor, at kunin ang kinakailangang pabalik na e.mf na halaga para sa pagproseso.

Pinoproseso ang Back EMF para sa Constant Torque
Ang iminungkahing circuit ay patuloy na sinusubaybayan ang likod e.m.f. at alinsunod dito ay kinokontrol ang kasalukuyang motor upang matiyak na, para sa isang itinalagang setting ng control ng palayok, ang likod na e.mf., kasama ang bilis ng motor ay pinananatili sa isang pare-parehong metalikang kuwintas.
Upang magawang mas madali ang paglalarawan ng circuit ay itinuturing na ang P2 ay nababagay at gaganapin sa posisyon na gitna nito, at ang risistor na R3 ay napili bilang isang katumbas ng halaga ng paglaban ng armature ng motor.
Kinakalkula ang Boltahe ng Motor
Ang boltahe ng motor ay maaaring kalkulahin sa pamamagitan ng pagdaragdag sa likod e.m.f. Ang Va na may boltahe ay bumaba sa motor na panloob na paglaban Vr.
Isinasaalang-alang na ang R3 ay bumaba ng isang boltahe Vr, ang output boltahe Vo ay magiging katumbas ng Va + 2 V.
Ang boltahe sa pag-invert ng input (-) ng IC1 ay magiging Va + Vr, at iyon sa di-inverting input (+) ay magiging Vi + (Va + 2Vr - Vi) / 2
Dahil ang dalawang lakas na boltahe sa itaas ay dapat na pantay-pantay, inaayos namin ang equation sa itaas bilang:
Va + Vr = Vi + (Va + 2Vr - Vi) / 2
Ang pagpapasimple sa equation na ito ay nagbibigay ng Va = Vi.
Ang equation sa itaas ay nagpapahiwatig na ang likod e.mf. ng motor ay tuloy-tuloy na gaganapin sa parehong antas tulad ng boltahe ng kontrol. Pinapayagan nitong gumana ang motor na may pare-pareho ang bilis at metalikang kuwintas para sa anumang tinukoy na setting ng pagsasaayos ng bilis ng P1.
Ang P2 ay kasama upang mabayaran ang antas ng pagkakaiba na maaaring mayroon sa pagitan ng paglaban ng R3 at paglaban ng armature. Isinasagawa ito sa pamamagitan ng pagsasaayos ng laki ng positibong feedback sa non-inverting input op amp.
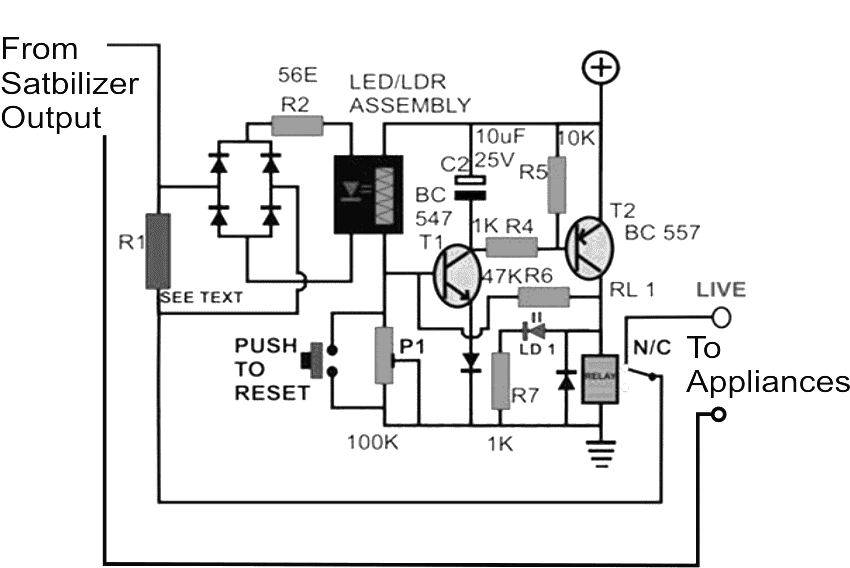
Karaniwang inihinahambing ng op amp LM3140 ang boltahe na nabuo sa kabuuan ng motor armature na may back emf na katumbas sa motor at kinokontrol ang potensyal na base ng T1 2N3055.
Ang T1 ay na-configure bilang isang tagasunod ng emitter kinokontrol ang bilis ng motor alinsunod sa potensyal na base nito. Pinapataas nito ang boltahe sa motor kung ang isang mas mataas na back emf ay napansin ng op amp, na nagreresulta sa pagtaas ng bilis ng motor, at kabaliktaran.
Ang T1 ay dapat na mai-mount sa isang angkop na heatsink para sa wastong paggana.
Paano Mag-set up ng Circuit
Ang pag-set up ng pare-parehong metalikang kuwintas ng motor circuit circuit ay ginagawa sa pamamagitan ng pag-aayos ng P2 sa motor na may iba't ibang pagkarga hanggang sa makamit ng motor ang isang pare-pareho na metalikang kuwintas hindi alintana ang mga kundisyon ng paglo-load.
Kapag ang circuit ay inilapat para sa mga modelo ng tren, dapat mag-ingat na hindi masyadong lumiko sa P2 patungo sa P1 na maaaring magresulta sa pagbagal ng modelo ng tren, at sa kabaligtaran na P2 ay hindi dapat lumipat ng sobra sa kabaligtaran na direksyon, na maaaring magresulta sa ang bilis ng tren talagang nakakakuha ng mas mabilis habang umaakyat ng isang pataas na gradient.
Nakaraan: Sinaliksik ang Simple Ni-Cd Battery Charger Circuits Susunod: Mini Transceiver Circuit