Ipinapaliwanag ng post ang isang simpleng circuit ng antas ng water controller na nalalapat para sa awtomatikong pag-toggling ng dalawang submersible water pump na halili bilang tugon sa isang paunang natukoy na paglipat ng antas ng tubig. Ang buong circuit ay binuo gamit ang isang solong IC at ilang iba pang mga passive na bahagi. Ang ideya ay hiniling ng isa sa mga interesadong miyembro ng blog na ito.
Teknikal na mga detalye
Maaari mo ba akong tulungan sa problemang ito: Sa isang basement sump, mayroong dalawa mga submersible pump kasama float switch (P1 at P2) na naka-install upang makamit ang ilang antas ng kalabisan.
Upang magamit nang pantay ang parehong mga bomba, nais naming kahalili sa pagitan ng P1 at P2 tuwing naabot ang isang preset na antas ng tubig. Iyon ay, sa unang pagkakataon na maabot ang preset na antas na P1 ay dapat magsimula at ibomba ang tubig. Susunod na oras kapag naabot na ang antas ng preset ay dapat na magsimula at ibomba ang tubig.
Sa susunod na okasyon ay turn ng P1 at iba pa. Ang kailangan namin ay isang 'alternating' relay control na tumatakbo sa P1 at P2 sa pamamagitan ng pagliko.
Ang disenyo
Ang ipinakitang circuit ng isang awtomatikong submersible pump controller ay maaaring maunawaan tulad ng ibinigay sa ilalim ng:
Tulad ng makikita ang buong circuit ay itinayo sa paligid ng apat Mga pintuang NAND mula sa isang solong IC 4093 .
Ang mga pintuang N1 - N3 ay bumubuo ng isang karaniwang flip flop circuit kung saan ang output ng N2 ay nagpapalipat-lipat mula sa mataas hanggang sa mababa at sa kabaligtaran bilang tugon sa bawat positibong nag-uudyok sa kantong ng C5 / R6.
Ang N4 ay nakaposisyon bilang isang buffer na ang input ay winakasan bilang sensing input para sa nakita ang pagkakaroon ng tubig sa isang paunang natukoy na nakapirming antas sa loob ng tangke.
Ang link mula sa lupa o ang negatibo ng circuit ay nakalagay din sa tangke ng tubig na malapit at kahanay sa input ng sensing sa itaas ng N4.
Sa paunang pag-aakalang walang tubig sa tangke ang nagpapanatili ng input ng N4 sa mataas sa pamamagitan ng R8, na nagreresulta sa isang mababang output sa kantong ng C5 / R6.
Nagre-render ito ng N1, N2, N3 at ang buong pagsasaayos sa isang hindi tumutugon na posisyon ng standby, na nagreresulta sa T1, T2 na nasa isang naka-switch na posisyon na OFF.
Hawak nito ang kani-kanilang relay na REL1 / 2 sa isang hindi naaktibo na posisyon kasama ang kanilang mga contact sa mga antas ng N / C.
Dito tinitiyak ng mga contact ng REL2 na ang supply boltahe ay mananatiling putol sa panahon ng kawalan ng tubig sa tank.
Ngayon ipagpalagay na ang tubig sa tanke ay nagsisimulang tumaas at tulay ang lupa na may mababang input ng N4 na mababa, naidudulot nito ang isang mataas na signal sa output ng N4.
Ang mataas na ito sa output ng N4 ay nagpapagana ng T2, REL2 at i-flip din ang output ng N2 na ang REL1 ay napapagana din. Pinapayagan ngayon ng REL2 ang boltahe ng mains na maabot ang mga motor.
At sa REL1 naaktibo din ang paggalaw ng pump P2 sa pamamagitan ng mga contact na N / O.
Sa sandaling lumubog ang antas ng tubig sa ibaba ng preset point ay ibabalik ang sitwasyon sa input ng N4, na lumilikha ng isang mababang output nito.
Gayunpaman ang mababang signal na ito mula sa N4 ay hindi gumagawa ng epekto sa REL1 tulad ng N1, N2, N3 na humahawak sa REL1 sa aktibong posisyon.
Ang REL2 na direktang umaasa sa N4 output ay lilipat sa OFF na pinuputol ang supply ng mains sa mga motor at lumilipat ng P2 OFF.
Sa susunod na pag-ikot kapag naabot ng antas ng tubig ang mga puntos ng pandama, ang output ng N4 ay nagpapalipat-lipat sa REL2 tulad ng dati na pinapayagan ang mains supply na maabot ang mga motor, at lilipat din ng REL1 ngunit sa oras na ito patungo sa contact na N / C.
Agad nitong binabaligtad ang P1 sa pagpapatakbo sapagkat ang P1 ay naka-configure sa N / C ng REL1 sa gayon ay nagpapahinga ng P2 at nagpapagana ng P1 sa okasyong ito.
Ang kahaliling pag-flip ng P1 / P2 sa itaas ay patuloy na inuulit sa mga nagpapatuloy na pag-ikot ayon sa mga operasyon sa itaas.
Diagram ng Circuit

Listahan ng mga bahagi para sa itaas na awtomatikong submersible pump controller circuit:
- R3, R9 = 10K,
- R4, R5, R8 = 2M2,
- R6, R7 = 39K,
- R4, R5 = 0.22, DISC,
- C6 = 100µF / 25V,
- D4, D5 = 1N4148,
- C4, C5, C7 = 0.22uF
- T1, T2 = BC 547,
- N1 --- N4 = IC4093,
- Relay = 12V, SPDT, 20 amp contactrelay dides = 1N4007
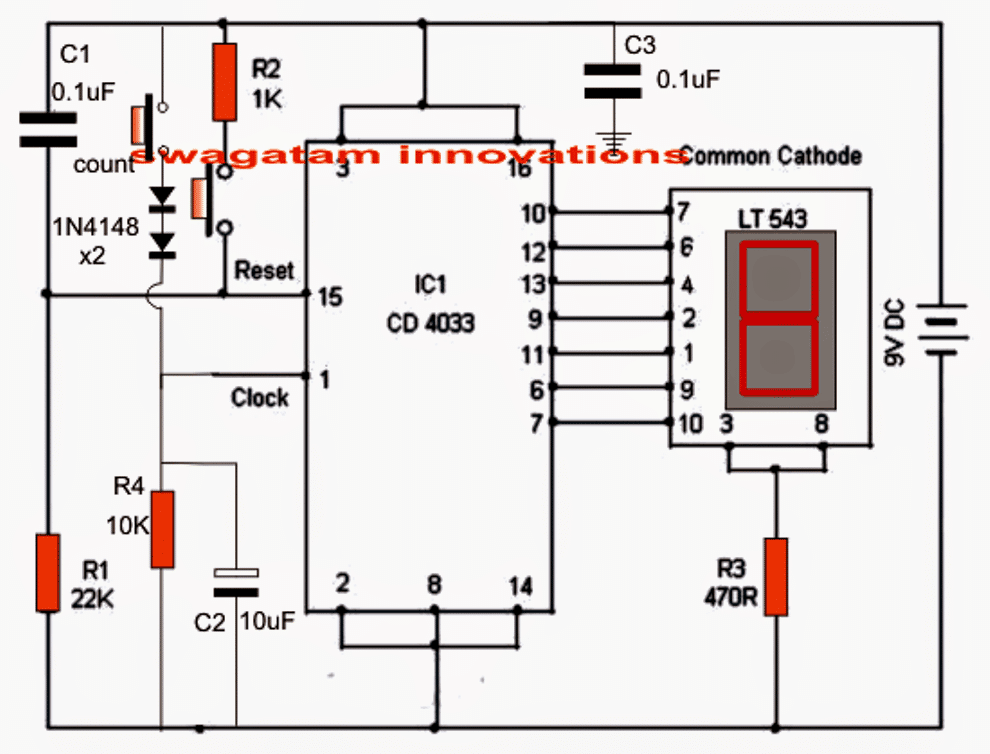
Nakaraan: Paano mag-Cascade IC 4033 sa Multiple Digit Counter Display Susunod: 1 hanggang 10 minuto Timer Circuit