Ang post ay nagpapaliwanag ng isang pamamaraan na maaaring maaaring magamit para sa pagpapahusay ng isang passive infrared sensor na may kakayahang makita kahit isang static o stationery na pagkakaroon ng tao. Ang tampok na ito ay karaniwang hindi posible sa mga maginoo na sensor ng PIR.
Paano Natutukoy ng PIR ang Pagkakaroon ng Tao
Napag-usapan ko na ang maraming mga aplikasyon ng paggalaw ng PIR batay sa website na ito, subalit ang lahat ng mga application na ito ay nangangailangan ng pagkakaroon ng tao na patuloy na gumalaw upang mapanatili ang pagtuklas ng PIR ng kanilang presensya, ito ay lilitaw na isang malaking sagabal na pumipigil sa mga yunit na ito mula sa pakiramdam isang pare-pareho o isang nakatigil na pananakop ng tao.
Gayunpaman ang ipinaliwanag sa itaas na sagabal ay may dahilan sa likod nito. Ang mga maginoo na sensor ng PIR ay gumagana sa pamamagitan ng pag-unawa ng mga signal ng IR mula sa isang katawan ng tao sa pamamagitan ng isang pares ng mga parallel slot sa kanilang front lens, at ang panloob na circuitry nito ay gagana lamang kapag ang mga signal ng IR ay tumatawid sa pagitan ng mga sensasyong ito ('visions').
Ang pagtawid ng mga signal ng IR sa kabuuan ng mga sensasyong puwang ay nagbibigay-daan sa circuit ng PIR na isalin ang impormasyon sa dalawang kaukulang alternating pulso, na siya namang naitama upang makabuo ng nakaka-trigger na boltahe sa out pin ng PIR.
Hindi Makita ng PIR ang Target ng Stationery
Ipinapahiwatig nito na kung ang pinagmulan ng IR ay walang paggalaw, hindi nito hihimokin ang module ng PIR upang makabuo ng anumang pag-trigger sa output pin nito. Ipinapahiwatig din nito na ang signal ng IR mula sa mapagkukunan ay dapat na kahit papaano manatili sa pagtawid sa ibinigay na mga puwang ng pagtuklas ng PIR upang paganahin itong maunawaan ang isang naibigay na tao sa loob ng zone.
Tila walang direkta o simpleng lunas para dito, dahil ang mga module ng PIR ay hindi maaaring baguhin sa loob para dito, na nakakadulas sa yunit mula sa pagtuklas ng nakatigil na presensya ng tao.
Gayunpaman ang isang lohikal na pagtalima ay nagsasabi sa amin na kung ito ay magkakaibang mapagkukunan ng IR na maaaring kailanganin upang mapanatili ang aktibo na module ng PIR, kung gayon bakit hindi pilitin ang PIR mismo na maging isang palaging paggalaw sa halip na ang paksa.
Ang konsepto ay maaaring mailarawan mula sa sumusunod na simulate ng GIF, na nagpapakita ng isang oscillating module ng PIR at isang static na tao sa detecting zone.

Makikita natin dito kung paano umaangkop ang isang oscillating PIR sa isyu at binago ang sarili nito na nagbibigay-daan sa pagtuklas ng kahit na mga static na paksa ng IR.
Naging posible ito sapagkat sa pamamagitan ng paggalaw nito binabago ng module ng PIR ang nakatigil na mapagkukunan ng IR sa isang tuluy-tuloy na pagbabago ng IR imaging sa kabuuan ng dalawang tumatanggap na mga puwang.
Kahit na ang ideya ay mukhang kumplikado, maaari itong talagang malulutas gamit ang isang mabagal na pag-oscillating na PwM na kinokontrol na circuit ng motor.
Malalaman natin ang buong mekanismo at ang mga detalye ng circuit sa mga sumusunod na seksyon.
Tulad ng napag-usapan na natin, ang maginoo na mga module ng PIR ay makakakita lamang ng mga gumagalaw na bagay na nabubuhay at hindi makilala ang isang nakatigil na target na ginagawang limitado ang aplikasyon nito bilang isang detektor ng paggalaw ng tao lamang.
Para sa mga aplikasyon kung saan ang pagtuklas ng mga walang kabayanang pagsakop ng tao ay kinakailangan sa mga nasabing senaryo ang isang maginoo na PIR ay maaaring maging walang silbi, at maaaring mangailangan ng ilang panlabas na pag-aayos para sa pag-upgrade mismo.
Pagdidisenyo ng PIR upang Makita ang Mga Target na Walang Paggalaw
Sa seksyon sa itaas natutunan namin na sa halip na mangangailangan ng target na gumalaw, ang module ng PIR ay maaaring ilipat mismo sa isang naibigay na radius para sa pagpapatupad ng nais na static na pagtuklas ng target.
Sa mga sumusunod na seksyon natututo kami tungkol sa isang simpleng mekanismo ng circuit na maaaring magamit sa isang PIR na naka-mount sa isang maliit na motor na DC para sa mga iminungkahing oscillation.
Ang PWM / Flip Flop Controlled Motor Driver
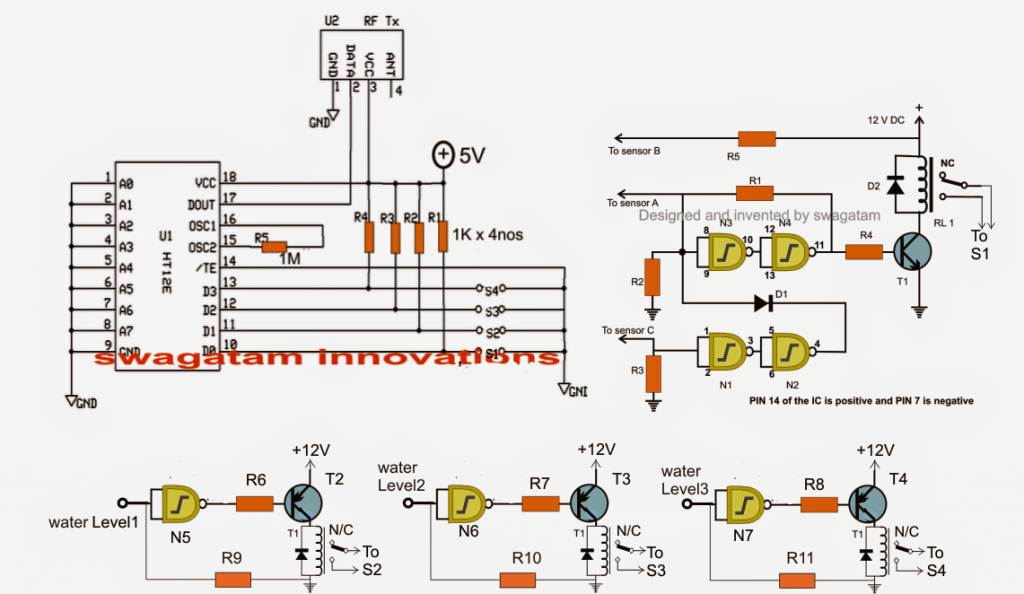
Karaniwang kinakailangan ng system isang kinokontrol na bilis ng PWM at isang flip flop na pagbabago para sa motor. Ipinapakita ng sumusunod na diagram kung paano maiugnay ang mga tampok na ito sa PIR motor sa tulong ng isang simpleng circuit:

Ang ipinakitang circuit ay gumagamit ng isang solong IC HEF40106 hex inverting schmitt gate IC na may kasamang 6 na inverter na HINDI gate.
Ang Gates N1 at N2 ay naka-configure upang makagawa ng isang naaayos na output ng PWM na kung saan ay pinakain sa mga pintuang N4, N5, N6 na bumubuo ng mga buffer.
Ang karaniwang output mula sa mga buffer gate na ito ay natapos sa gate ng isang motor driver na mosfet.
Ang nilalamang PWM ay itinakda sa tulong ng P1, na sa wakas ay inilalapat sa nakakonektang motor sa pamamagitan ng isang hanay ng mga contact ng relay ng DPDT.
Ang mga contact na ito ng relay ay tumutukoy sa direksyon ng paggalaw ng motor (pakaliwa o anticlockwise).
Ang flip flop DPDT relay contact ay kinokontrol ng isang astable timer na naka-configure sa paligid ng gate N3, kung saan tinutukoy ng capacitor C3 / R3 kung anong rate ang kailangang i-relay ng relay upang payagan ang motor na palaging baguhin ang direksyong paikot.
Pinapayagan ng disenyo sa itaas ang motor na ipatupad ang kinakailangang mabagal sa at pabalik na paggalaw ng oscillating sa isang naibigay na radial zone.
Maaaring mapili ang C3 upang simulan ang pagbabago pagkatapos ng bawat 5 hanggang 6 na segundo, at ang PWm ay maaaring maiakma upang paganahin ang isang labis na mabagal na paggalaw ng motor, dahil kailangan lamang nitong matiyak na ang mga puwang ng PIR ay tumawid sa mga signal ng IR ng target sa isang napapanahong paraan.
Gayunpaman dahil ang pagpapatakbo ng motor ay mabagal, ang output mula sa PIR ay kailangang mapanatili sa pamamagitan ng isang pagka-antala OFF timer upang ang nakakonektang pagkarga ay hindi lumipat sa OFF at ON habang ang paggalaw ng motor na kahalili ay pinuputol ang mga linya ng IR mula sa pananakop ng tao.
Ang Delay Timer
Ang mga sumusunod antalahin ang yugto ng circuit ng timer maaaring magamit na tinitiyak na sa bawat oras na ang output ng PIR ay gumagawa ng sens na pulso, ang pagkaantala mula sa timer ay pinalawig ng 5 hanggang 10 segundo at ang konektadong pagkarga ay hindi nagambala sa panahon ng proseso.

Sa itaas na pag-set up makikita natin ang motor na tumatanggap ng supply ng de-kuryenteng drive mula sa yugto ng PWM / flip flop tulad ng tinalakay sa nakaraang talata.
Ang spindle ng motor ay makikita na kaisa ng isang pahalang na baras kung saan naka-clamp ang PIR, tulad ng kapag gumagalaw ang motor, dumaan ang PIR sa isang tumutugma na pagbabago ng radial papunta at pabalik na paggalaw.
Habang ang paggalaw sa PIR sa itaas ay sapilitan, ang mga signal ng IR mula sa isang nakatigil na target sa zone ay napansin sa anyo ng mga maikling kahaliling pulso, na nabuo sa output pin ng PIR na nakasaad sa asul na kawad.
Ang mga pulso na ito ay inilalapat sa kabuuan ng 1000uF capacitor na singil sa bawat pulso at tinitiyak na ang BC547 ay itinatago sa mode na pagsasagawa nang walang pagkaantala sa panahon ng proseso.
Ang driver ng relay na binubuo ng yugto ng BC557 ay tumutugon sa matatag na signal sa itaas mula sa kolektor ng BC547 at pinapanatili ang relay na ON, hangga't patuloy na nakikita ng PIR ang pagkakaroon ng tao.
Ang pag-load ng relay sa gayon ay mananatiling patuloy na naaktibo dahil sa pagkakaroon ng isang nakatigil na tao sa lugar.
Gayunpaman kung sakaling ang pagtanggal ng tao ay natanggal o kapag ang target ay lumayo mula sa zone, ang yugto ng pagkaantala ng timer ay nagpapanatili ng relay at ang pag-load ay naaktibo para sa itinakdang 5 hanggang 10 segundo matapos na ito ay tuluyan na masara, hanggang sa ang zone ay muling makuha. ng isang potensyal na mapagmulang IR na nagmumula.
Listahan ng Mga Bahagi
- R1, R4 = 10K
- R2 = 47 OHMS
- P1 = 100K POT
- D1, D2 = 1N4148
- D3 = MUR1560
- C1, C2 = 0.1uF / 100V
- Z1 = 15V, 1/2 WATT
- Q1 = IRF540
- Q2 = BC547
- N1 --- N6 = IC MM74C14
- DPDT = DPST SWITCH O DPDT RELAY
- Ang R3, C3 ay matutukoy ng ilang pagsubok at error
I-UPDATE:
Sa itaas ay ipinaliwanag ang circuit ng PIR para sa pagtuklas ng static na pagkakaroon ng tao ay maaaring gawing mas simple sa pamamagitan ng paggamit ng isang signal chopper circuit na itinatanghal sa sumusunod na GIF simulation:
Ipinapakita ng maingat na inspeksyon na talagang hindi kinakailangan ang isang kilusang oscillatory, maaaring payagan ang motor at ang talim ng chopper na paikutin nang malaya sa pamamagitan ng pagpapanatili ng bilis ng motor sa isang mas mababang antas .
Ito ay epektibo ring makamit ang inilaan na static na operasyon ng sensasyon ng PIR.

Video Demo na nagpapatunay ng static na pagtuklas ng tao para sa isang PIR
Nakaraan: Ipinaliwanag ang 3 Tunog na Pinapagana ng Mga Circuit ng Switch Susunod: 4 Simple Siren Circuits na maaari mong Buuin sa Bahay