
Panimula sa Mga naka-embed na Sistema
Ang system kung saan ang nakatuon na layunin ng software ay naka-embed sa isang disenyo ng hardware ay kilala bilang naka-embed na system. Ang sistemang ito ay maaaring alinman sa isang malayang sistema o isang mas malaking system. Karaniwang nai-embed ang software mga module ng memorya bilang ROM, at hindi ito nangangailangan ng anumang pangalawang memorya tulad ng sa isang computer. Telecom, mga smart card, missile, computer networking, digital electronics ng consumer at mga satellite ay ilan sa mga naka-embed na mga application ng system.

Mga Application ng Embedded System
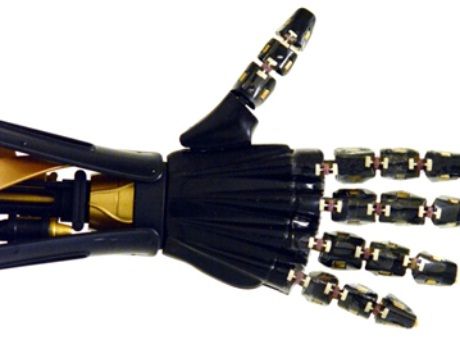
Mga application ng naka-embed na system isama ang Robotics, digital camera, mga laruan na maraming gawain, pagluluto at paghuhugas ng mga sistema, mga sistemang biomedical, mga kontrol ng key-board, mga mobile at smart phone, system ng computing, electronic smart weight display system at mga entertainment system, tulad ng mga video, laro, music system at mga video game, at iba pa.
Naka-embed na proseso ng disenyo ng system ay maaaring gawin sa pamamagitan ng simulation muna, na ginagamit para sa pagsubok ng circuit dahil ang pagbabago ng hardware ay nagiging napakahirap kung ang mga malfunction ng circuit. Kung ang mga resulta ay naitugma sa mga nais, ang proseso ay permanente na ididisenyo ng sunud-sunod na mga proseso ng manipis na tinapay.
Mga Pangunahing Kaalaman ng Embedded System
Ang mga naka-embed na system ay idinisenyo upang maisagawa ang mga tiyak na gawain, ngunit hindi maaaring gamitin bilang mga pangkalahatang layunin na computer upang magsagawa ng iba't ibang mga gawain. Ang software para sa naka-embed na system ay karaniwang tinutukoy bilang firmware, na maaaring maimbak sa isang disc o sa isang solong maliit na tilad. Ang dalawang pangunahing elemento ng mga system ay:
- Naka-embed na Hardware ng System
- Naka-embed na Software ng System

Naka-embed na Hardware at Software ng System
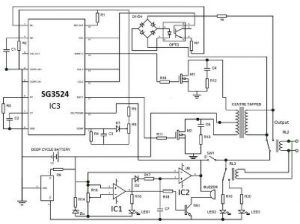
Naka-embed na Hardware ng System : Ang isang naka-embed na system ay nangangailangan ng isang platform ng hardware upang makipag-ugnay sa iba't ibang mga real-time na input at output o variable. Kasama sa hardware ang controller tulad ng microcontroller o microprocessor , mga module ng memorya, mga interface ng I / O, mga display system at module ng komunikasyon, atbp.
Naka-embed na Software ng System : Pinapayagan ng software na ito ang pag-program sa nais na paraan na kinokontrol nito ang iba't ibang mga operasyon. Ito ay nakasulat sa isang mataas na antas na format, na pinagsama-sama sa code, at pagkatapos ay itinapon sa mga Controllers ng hardware.
Mga system na naka-embed na real-time ay mga computer system na nagsasagawa ng mga aksyon, tulad ng pagsubaybay, pagtugon at pagkontrol sa panlabas na paggalaw. Ang panlabas na kapaligiran ay konektado sa computer system sa pamamagitan ng mga sensor , mga actuator at interface ng I / O. Ang isang tunay na computer system na naka-embed sa isang computer system ay kilala bilang real-time embedded system. Ang isang real-time na naka-embed na sistema ay ginagamit sa iba't ibang larangan tulad ng militar, sektor ng gobyerno at medikal.
Mga Proyekto ng Robotic Real Time sa Mga naka-embed na Sistema
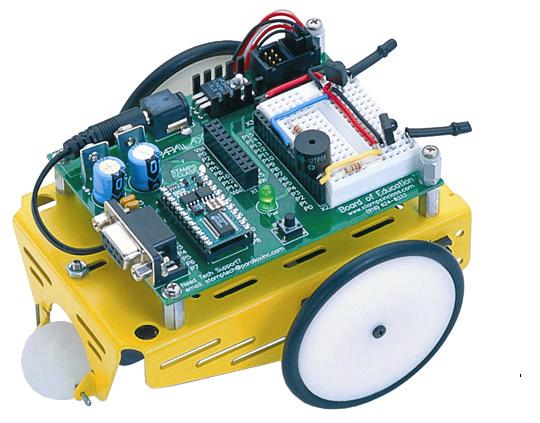
Mga naka-embed na system maaaring magamit sa marami sa mga real-time na application tulad ng mga sasakyan, robot, industriya, atbp Ang mga sumusunod ang mga real-time na proyekto ay nauugnay sa teknolohiya ng robotics .
1. Kinokontrol ng Boses na Robotic Vehicle na may Long Distance Speech Recognition
Ang layunin ng proyektong ito ay upang makontrol ang isang robotic na sasakyan sa pamamagitan ng mga utos ng boses para sa malayuang operasyon. Isang 8051 microcontroller ay ginagamit sa isang module ng pagkilala sa pagsasalita upang maisagawa ang nais na operasyon. Gumagamit ito ng isang 8051 micro controller, isang module ng pagkilala sa pagsasalita, isang pindutan ng push, isang module ng RF, isang encoder, isang decoder, isang motor na driver ng IC, DC motor, baterya at iba pang mga magkakaibang sangkap.

Kinokontrol ng Boses Robotic Vehicle- Transmitter
Ang mga paggalaw ng sasakyan tulad ng kaliwa, kanan, pataas at pababa ay maaaring maisagawa sa pamamagitan ng paggamit ng mga pindutan ng push o utos ng boses ng isang module na pagkilala sa pagsasalita na nakakonekta sa microcontroller. Dito, ginagamit ang isang encoder upang ma-encode ang mga utos na ibinigay sa microcontroller sa pamamagitan ng paggamit ang transmiter ng RF upang maipadala ang mga signal sa dalas ng 433 MHz.
Samakatuwid, kapag ang mga signal na lumitaw sa pamamagitan ng pagpindot sa mga pindutan, o ang mga signal ng utos ng boses na naaayon sa paggalaw ay natanggap ng micrcontroller, nagpapadala ito ng mga signal ng control sa reciever circuit sa pamamagitan ng module ng transmitter.

Kinokontrol ng Boses na Robotic Vehicle-Receiver
Sa pagtanggap ng mga signal na ito, inililipat ng isang RF reciever ang mga signal sa isang decoder circuit kung saan ang data ng binary ay na-convert sa isang signal na antas ng micrcontroller. Samakatuwid, ginagawa ng micrcontroller ang nais na paggalaw mula sa transmitter circuit. Ang module ng laser ay nakipag-interfaced sa microcontroller para sa pagtuklas ng mga pagpapatakbo na isinagawa ng robot kahit sa mga madilim na lugar.
2. Pindutin ang screen na nakabatay sa Remote Controlled Robotic Vehicle para sa Pamamahala ng Tindahan
Ang proyektong ito ay nagsasangkot ng pagkontrol sa isang robotic na sasakyan gamit ang isang touch-screen display yunit para sa malayuang operasyon. Ang isang touch-screen panel ay inilalagay sa dulo ng transmitter, at a pick-n-place na robot ay inilalagay sa dulo ng tatanggap upang magsagawa ng isang gawain sa pamamagitan ng pagtugon sa mga signal. Ang mga sangkap ng hardware na ginamit sa proyektong ito ay nagsasama ng isang 8051 microcontroller, isang touch-screen panel, antennas (panig ng transmitter-receiver), isang encoder, isang decoder, DC motor, isang Robotic body, isang baterya, atbp.

Batay sa Touch Screen batay sa Robotic Vehicle- Transmitter
Tulad ng tinalakay sa module ng pagkilala sa pagsasalita ng proyekto sa itaas, sa proyektong ito ay nagpapadala rin ang isang module ng touch screen ng mga signal ng kontrol na naaayon sa paggalaw ng sasakyan sa microcontroller. Kasunod na ipinapadala ng controller ang mga signal sa encoder, at pagkatapos ay sa transmiter na kalaunan ay nagpapadala ng mga signal sa circuit ng receiver.

Batay sa Touch Screen batay sa Robotic Vehicle-Receiver
Ang antena na nakalagay sa dulo ng tatanggap ay tumatanggap ng mga signal ng RF mula sa nagpapadala na antena, at ina-decode ang data, at pagkatapos ay ipinapadala ang data na iyon sa microcontroller. Ang set up na ito ay may apat na motor na nakipag-interfaced sa microcontroller: dalawang motor para sa paggalaw ng braso at gripper at ang dalawa pa para sa paggalaw ng katawan. Ang lahat ng mga motor na ito ay hinihimok ng isang driver ng motor na IC na patuloy na tumatanggap ng mga utos mula sa microcontroller.
Ito ang dalawa naka-embed na mga application ng system sa larangan ng robotics. Ang mga real-time na halimbawa ng mga naka-embed na system ay maaaring magbigay sa iyo ng isang mas mahusay na pag-unawa sa konsepto ng mga naka-embed na system. Kung mayroon kang anumang karagdagang pagdududa sa pagpapatupad ng mga proyektong ito, maaari kang makipag-ugnay sa amin sa pamamagitan ng pagkomento sa ibaba.
Mga Kredito sa Larawan
- Mga Application ng Embedded System oocities
- Naka-embed na Hardware at Software ng System dca-disenyo





{kind=link}