Sa panahong ito ng pang-industriya na awtomatiko , ang mga robot ay ginagamit para sa paghawak ng iba't ibang mga proseso para sa tumpak at mas mahusay na kalidad ng produksyon. Ang pagpili ng perpektong motor para sa perpektong robot ay palaging isang matigas na gawain habang ang pagdidisenyo ng robot lalo na para sa mga industriya. Wastong pagpili ng mga de-koryenteng motor sa mga pang-industriya na robot ay nangangailangan ng maraming mga parameter upang isaalang-alang ang kontrol ng bisig, posisyon, anggular at linear na paggalaw.

Mga Motors na Ginamit sa Industrial Robotics
Ang pagpili ng motor ay ang hindi gaanong naiintindihan na konsepto para sa mga hobbyist ng robotics na nangangailangan ng diskarte at seryosong pagsusuri. Nagsasangkot ito sa pagtukoy ng bilis ng robot, pagpabilis, mga kinakailangan sa metalikang kuwintas batay sa bigat ng robot, laki ng gulong at aplikasyon kung saan ito ipatutupad. Maraming uri ng motor ay magagamit sa merkado ngayon, ngunit karamihan sa mga maliliit na motor ng pager, mga motor na servo , linear motor, stepper motor at DC na nakatuon sa motor ay ginagamit sa mga pang-industriya na robot ayon sa kanilang lugar ng aplikasyon.
Ang hindi tamang pagpili ng motor ay nagtapos sa isang may kapansanan na robot kaya anong uri ng motor ang pinakamahusay at angkop na gawing totoo, tumpak at sapat ang mga pang-industriya na robot na natugunan ang lahat ng pangangailangan ng pang-industriya habang iniisip ang lahat ng makatotohanang mga pagtutukoy?
Natipon namin ang ilang mga pananaw sa motor na ito mula sa mga propesyonal sa industriya para sa pagpili ng kaukulang motor na mapipili para sa mga pang-industriya na aplikasyon.
Hinihikayat ka naming sundin ang mga opinyon ng mga dalubhasa na naglalayong magbigay ng pinakamahusay na mga motor para sa pang-industriya na robot na may magagamit na DC, stepper, brushless at servo motor para sa tumpak, mabisang gastos at maaasahang paggalaw ng robot.
Ch.Sampath Kumar
M.tech sa VLSI Design
Teknikal na Sumusulat ng Nilalaman
 Ang mga motor na DC ay magagamit sa malawak na saklaw para sa tuluy-tuloy na operasyon, ngunit nangangailangan ito ng mga pagbawas ng gear upang umangkop para sa kaukulang aplikasyon. Ang stepper motor ay hindi nangangailangan ng anumang pagbawas ng gear dahil ang stepped na operasyon nito ay nagbibigay ng mababang bilis para sa mga tinukoy na application. Sa wakas ang mga servo motor ay ginagamit para sa tumpak at tumpak na kontrol na ipinatupad sa mga operasyon ng closed loop. Ngunit nangangailangan ito ng dagdag na puna at circuit ng pagmamaneho kaya't ito ay mas mahal kaysa sa DC at stepper motor. Kaya't ang mga motor na servo ay ginagawang mas maaasahan ang robot dahil sa tumpak na paggalaw nito.
Ang mga motor na DC ay magagamit sa malawak na saklaw para sa tuluy-tuloy na operasyon, ngunit nangangailangan ito ng mga pagbawas ng gear upang umangkop para sa kaukulang aplikasyon. Ang stepper motor ay hindi nangangailangan ng anumang pagbawas ng gear dahil ang stepped na operasyon nito ay nagbibigay ng mababang bilis para sa mga tinukoy na application. Sa wakas ang mga servo motor ay ginagamit para sa tumpak at tumpak na kontrol na ipinatupad sa mga operasyon ng closed loop. Ngunit nangangailangan ito ng dagdag na puna at circuit ng pagmamaneho kaya't ito ay mas mahal kaysa sa DC at stepper motor. Kaya't ang mga motor na servo ay ginagawang mas maaasahan ang robot dahil sa tumpak na paggalaw nito.
Viswanath Prathap
M.Tech sa Electrical Power Engineering
Teknikal na Sumusulat ng Nilalaman

Pumili at maglagay ng mga Robot ay karaniwang matatagpuan sa mga industriya upang pumili ng isang bagay mula sa isang posisyon o lugar at ilagay ito sa ibang posisyon o lugar. Para sa layuning ito, ang mga paggalaw ng anggular ng mga robot ay kailangang makontrol, na maaaring makamit gamit ang mga servo motor. Ang mga servo motor na ito ay kinokontrol gamit ang data ng PWM na ibinigay ng robotic controller para sa paggalaw ng mga kasukasuan ng mga robot. Ang mga motor ng servo ay may kakayahang makabuo ng sapat na metalikang kuwintas upang mabilis na ilipat ang isang bagay mula sa posisyon na huminto. Kaya, ginagamit ito bilang gulong sa militar at pang-industriya na robot na sasakyan. Ang mga stepper motor ay maaari ding gamitin para sa pagkontrol ng posisyon ngunit ang mga ito ay ubusin ang lakas kahit na sa panahon ng pahinga para sa pagla-lock at paghawak lamang ng na-utos na posisyon. Kaya, ang mga servo motor ay karaniwang ginagamit sa mga pang-industriya na robotiko bilang isang mataas na kahalili sa pagganap sa mga stepper motor.
S. Naresh Reddy
M.tech sa Embedded System
Patnubay sa proyekto
Ang istraktura ng mekanikal na robot ay dapat kontrolin sa perfo  rm gawain. Mayroong tatlong magkakaibang mga phase upang makontrol ang robot tulad ng pang-unawa, pagproseso at pagkilos. Ibinibigay ng mga sensor ang impormasyon tungkol sa posisyon ng mga kasukasuan nito at ang end effector nito sa robot, pagkatapos ang impormasyong ito ay naproseso sa control unit at kalkulahin ang naaangkop na signal sa motor na gumagalaw nang wala sa loob. Ang malaking karamihan ng mga robot ay gumagamit ng mga de-kuryenteng motor. Ang paulit-ulit na brushless at brushing DC na motors ay ginagamit sa portable robot at ang AC motor ay ginagamit sa mga industrial robot. Ang mga motor na ito ay ginustong sa mga system na may mas magaan na pagkarga, at kung saan ang nangingibabaw na anyo ng paggalaw ay paikut-ikot.
rm gawain. Mayroong tatlong magkakaibang mga phase upang makontrol ang robot tulad ng pang-unawa, pagproseso at pagkilos. Ibinibigay ng mga sensor ang impormasyon tungkol sa posisyon ng mga kasukasuan nito at ang end effector nito sa robot, pagkatapos ang impormasyong ito ay naproseso sa control unit at kalkulahin ang naaangkop na signal sa motor na gumagalaw nang wala sa loob. Ang malaking karamihan ng mga robot ay gumagamit ng mga de-kuryenteng motor. Ang paulit-ulit na brushless at brushing DC na motors ay ginagamit sa portable robot at ang AC motor ay ginagamit sa mga industrial robot. Ang mga motor na ito ay ginustong sa mga system na may mas magaan na pagkarga, at kung saan ang nangingibabaw na anyo ng paggalaw ay paikut-ikot.
Suresh megaji
M. Tech sa Mga Wireless System ng Komunikasyon
Teknikal na Sumusulat ng Nilalaman

Kung nais mong maging kasangkot sa 'robotics' at ang kanilang aplikasyon sa 'industriya', dapat malaman ng isa ang tungkol sa 'Motors' na ginamit sa robotics dahil ang robotics ay nakasalalay sa karamihan sa mga motor. Karaniwan ang 'robotic machine' ay ginagamit para sa iba't ibang mga application sa paggawa. Iba't ibang mga 'motor' tulad ng D.C, Pulsed, Stepper, Optical drive, Partial turn, at hall effect motors, atbp ... ay ginagamit sa ilang mga diskarte upang mailapat ang mga ito sa industriya at gawing magiliw sila, tulad ng
- Ginagamit ang mga motor ng D.C para sa mga application na nakatuon sa baterya, mas mabagal ang bilis, mga application ng paggalaw.
- Kung saan kailangan namin ng isang application na nakatuon sa pag-ikot, maaari naming gamitin ang mga Stepper motor tulad ng unipolar at bipolar motors.
- Para sa paggalaw ng ulo at braso, maaari naming gamitin ang bahagyang mga motor sa pagliko.
- Kung nais naming gumamit ng mga magnetic field, maaari naming gamitin ang Hall Effect at mga optical drive motor atbp.
Sa pamamagitan ng paggamit ng mga robot na gumagamit ng matalinong mga motor, makakatipid tayo ng pera, oras, espasyo, mapanganib na paggalaw atbp.
Ajay Sahare
Executive Executive

Ang mga robot na pang-industriya ay ginagamit sa isang pang-industriya na kapaligiran sa pagmamanupaktura. Ito ang mga braso na partikular na binuo para sa mga naturang aplikasyon tulad ng hinang, paghawak ng materyal, pagpipinta at iba pa.
Hindi lahat ng mechatronic aparato na ginamit sa pang-industriya na kapaligiran ay maaaring ituring bilang isang robot. Tulad ng tinukoy ng ISO (International Standards Organization) ang isang awtomatikong kinokontrol, muling nai-programme, multipurpose manipulator na mai-programm sa tatlo o higit pang mga palakol ay itinuturing na pang-industriya na robot.
Ang mga motor na ginamit sa Industrial Robotics ay
- Mga alternatibong Kasalukuyang (AC) Motors
- Mga Motorsang Direkta-Kasalukuyang (DC)
- Mga Servo Motors
- Mga Stepper Motors.
1. Ang mga AC motor ay maaaring karagdagang nahahati sa mga asynchronous at kasabay na mga uri. Halimbawa, ang isang induction AC motor ay isang unit na hindi asynchronous na uri na mahalagang binubuo ng isang wire-sugat na stator at isang rotor. Ang kuryente ay konektado sa wire at kasalukuyang AC na dumadaloy sa pamamagitan nito ay nagdudulot ng isang electromagnetic (EM) na patlang sa coiled wire, na may isang sapat na malakas na patlang na nagbibigay ng lakas para sa paggalaw ng rotor. Ang mga magkasabay na motor ay pare-pareho ang bilis ng mga motor na nagpapatakbo ng kasabay sa dalas ng linya ng AC at karaniwang ginagamit kung saan kinakailangan ang tumpak na bilis.
2. Maraming mga pang-industriya na aplikasyon, kabilang ang robotics, ay madalas na gumagamit ng DC motors dahil sa kadalian ng pagkontrol ng bilis at direksyon. May kakayahan ang mga ito ng isang walang katapusang saklaw ng bilis, mula sa buong bilis hanggang sa zero, na may malawak na hanay ng mga naglo-load.
Dahil ang DC Motors ay nagtatampok ng isang mataas na ratio ng metalikang kuwintas sa pagkawalang-galaw, maaari silang mabilis na tumugon sa mga pagbabago sa mga signal ng kontrol. Ang isang DC motor ay maaaring maayos na makontrol sa zero na paggalaw at agad na mapabilis sa kabaligtaran na direksyon nang hindi kailangan ng kumplikadong circuit ng switching ng kuryente. Ang mga permanenteng-magnet na brushless DC motor ay karaniwang mas mahal kaysa sa mga uri ng brush, bagaman maaari silang magbigay ng mga kalamangan sa pagkonsumo ng kuryente at pagiging maaasahan.
Nang walang isang commutator, ang mga brushless motor ay maaaring gumana nang mas mahusay at sa mas mataas na bilis kaysa sa maginoo DC motors. Karamihan sa mga brushless DC motor ay tumatakbo sa isang trapezoidal AC waveform, ngunit ang ilan sa mga motor ay nagpapatakbo ng mga sine alon. Ang makinis na hinihimok ng brush na motor ay maaaring makamit ang makinis na pagpapatakbo ng isang mas mababang bilis na may mababang torque ripple, na ginagawang perpekto para sa paggiling, patong, at iba pang mga application tulad ng pagtatapos sa ibabaw.
Sa kaso ng mga motor na Brush DC, kung nais mong paikutin ang iyong motor nang mas mabagal nang hindi nawawalan ng kuryente, maaari mong gamitin ang pulso width modulation (PWM). Karaniwang nangangahulugang ilipat ang motor nang napakabilis. Sa ganitong paraan, umiikot ang motor na may mas mababang bilis na para bang ang mas mababang boltahe ay mailalapat nang hindi nag-aalaga ng lakas.
Talaga, ang metalikang kuwintas na nabuo ng isang brushing DC motor ay masyadong maliit at ang bilis ay masyadong mahusay upang maging kapaki-pakinabang. Kaya, ang mga pagbabawas ng gear ay karaniwang ginagamit upang mabawasan ang bilis at dagdagan ang metalikang kuwintas.
3. Ang mga motor ng servo ay ginagamit sa mga closed-loop system na may isang digital controller. Nagpapadala ang tagapamahala ng mga utos ng tulin sa isang driver amplifier, na nagpapakain naman sa servo motor. Ang ilang uri ng aparato ng feedback, tulad ng isang resolver o encoder, ay nagbibigay ng impormasyon sa posisyon at bilis ng servo motor. Ang resolver o encoder ay maaaring isama sa motor o matatagpuan nang malayuan. Dahil sa closed-loop system, ang isang motor na servo ay maaaring gumana na may isang tukoy na profile ng paggalaw na na-program sa controller.
4. Ang mga motor na Stepper ay maaaring gumana nang mayroon o walang puna, na may pag-ikot ng motor na nasira sa maliliit na mga anggulong hakbang. Ito ay kinokontrol ng mga pulsed na signal ng utos, at maaaring tumigil nang tumpak sa isang utos na punto nang hindi na kailangan ng preno o mga assemble ng klats. Kapag tinanggal ang lakas, isang permanenteng-magnet stepper motor na pangkalahatan ay mananatili sa huling posisyon nito. Ang maramihang mga motor na stepper ay maaaring mapanatili sa pagsabay sa pamamagitan ng paghimok sa kanila mula sa isang pangkaraniwang mapagkukunan.
Dev desai
Executive Executive 
Kung balak mong makisali sa robotics, kakailanganin mong pamilyar ang iyong sarili sa maraming uri ng mga motor na magagamit, Lahat ng kilusan ng robot ay naka-motor sa isang paraan o iba pa, kaya mahalagang malaman kung ano ang iyong pagpipilian.
DC Motors
Bukod sa pinapatakbo ng baterya, ang direksyon ng paggalaw ng isang motor na DC ay natutukoy ng polarity ng input ng kuryente. Ito ay isang ganap na pangangailangan para sa mga robotic function. Sa kasamaang palad, ang ganitong uri ng motor ay may iba't ibang laki, mga kinakailangan sa boltahe, at magagamit kahit saan.
Ang iba't ibang mga uri ng motor ay nasa ibaba
- Mobility base motor
- Mataas na bilis ng libangan na motor
- Belt drive motor
- Slot car motor
- Pinapatakbo ang pulso
- Ang motor na inangkop ng braso
- Bipolar stepper na may pointer
Bio Motor
Ang Bio-metal ay isang kamangha-manghang sangkap na nasa paligid ng ilang taon at mayroon itong bilang ng mga application sa larangan ng robotics. Maaari nating makita sa ilustrasyon, na ang isang piraso ng kawad na bio-metal ay magpapaliit ng limang porsyento ng haba nito kapag ilang volts lamang ang inilapat sa kabuuan nito. Matapos ang mga taon ng pagsubok, ang bio-wire ay napatunayan na maging malakas, maaasahan, at nagiging mas kapaki-pakinabang sa paglitaw ng mga bagong produkto. Ang medyo mabagal na oras ng pagtugon ay ginagawang perpekto para sa robotic na mga aplikasyon ng braso at kamay, kung saan ang pagiging maselan ay magiging problema. Ang isang mahabang piraso ng kawad ay maaaring makagawa ng isang makabuluhang kilusan kapag na-uunat ang buong haba ng isang robotic arm. Mayroong mga robotic arm kit na kasalukuyang nasa komersyal na merkado na gumagamit ng bio metal.
Relay
Ang relay, sa mga robotics, ay halos palaging ginagamit upang ihiwalay ang lakas na inilaan para sa mga motor, mula sa power supply para sa pagpapaandar ng computer. Ang mga motor, dahil sa kanilang mababang impedance, ay gumagawa ng mga mabibigat na kasalukuyang hinihingi sa mga power supply at lumikha ng maraming mga glitches na hindi kinaya ng mga computer. Samakatuwid isang magandang ideya na gumamit ng isang hiwalay na mataas na kasalukuyang mapagkukunan para lamang sa mga motor.
Solenoids
Ang solenoids ay pinakamahusay na ginagamit bilang mga aparato ng kontrol sa manipulator o switch operator. Ang kanilang paggalaw ay mabilis at malakas, kaya't ang isang bukal ay halos palaging ginagamit sa mga graspers upang mapahina ang pagkilos. Tulad ng nakikita mo sa ilustrasyon, ginagamit ang mga control wire upang isara ang grasper. Ang mga control wires na ito ay maaari ring kumilos bilang mga return spring. Ang mga graspher tulad nito ay mas maraming natagpuan sa gawain ng linya ng produksyon kung saan ang gawain ay napaka nasusukat at sumasakop sa mga makitid na parameter.
Pangalawang Pag-andar
Karamihan sa mga pagpapaandar ng motor ay may kasamang kadaliang kumilos, braso, ulo, o ilang ibang nakikitang panlabas na paggalaw, subalit, ang ilang paggalaw ng motor ay hindi gaanong nakikita. Ang mga malalaking robot na pang-industriya ay gumagamit ng mga sistemang haydroliko na gumagamit ng mga motor ng bomba upang makagawa ng isang presyon ng pagpapatakbo ng isang haydroliko na likido. Ang isa pang mahalagang pangalawang pag-andar ng mga motor ay kinokontrol na pagsasaayos. Upang mapabuti ang kawastuhan, ang mga potensyal na nakakonekta sa mga motor ay karaniwang mga multi-turn device.
Konklusyon
Ang mga robot ay maaaring maging napaka-kumplikadong mga aparato na nangangailangan ng isang iba't ibang mga paggalaw na hinimok ng motor. Ang artikulong ito ay inilaan upang magbigay ng isang pangkalahatang-ideya ng saklaw ng mga aparato na maaaring makitungo sa iyo bilang isang tagabuo ng robot. Magandang ideya na magsimula sa pamamagitan ng pagsasaliksik sa mga tagapagtustos ng robotic kagamitan at magagamit na mga supply. Mayroong malawak na dami ng magagamit na produkto ngayon at ginagawang madali ng Internet na maghanap, matuto tungkol sa, at magagamit. Anuman ang iyong mga pangangailangan, isang maliit na talino sa paglikha at pagpapasiya na ang lahat ng mga tagabuo ng robot ay dapat magkaroon ng mahusay na paglilingkod sa iyo.
Samadan Wandre
Executive Executive
'Mga motor na ginamit sa Robotics'
- Mobility base motor

- Mataas na bilis ng libangan na motor
- Belt drive motor
- Slot car motor
- Pinapatakbo ang pulso
- Ang motor na inangkop ng braso
- Bipolar stepper na may pointer

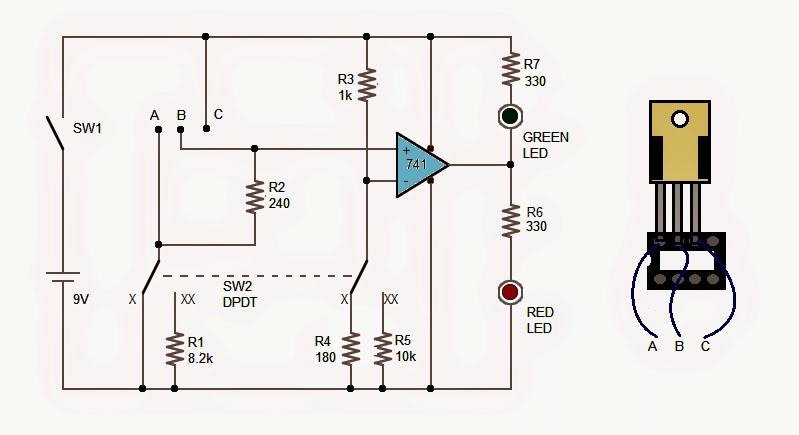
Ang mga mas malaking motor ay pinakaangkop para sa mga base ng kadaliang kumilos na nagpapahintulot sa mga robot na maneuver ang kalupaan. Ang ilan sa mga motor na ito ay mayroong mga gearbox upang makagawa ng mas mabagal na bilis at metalikang kuwintas na kinakailangan para sa kadaliang kumilos. Ang pagbaba ng boltahe sa isang motor ay maaari ring pabagalin ito sa isang kanais-nais na bilis. Ang pag-eeksperimento lamang ang maaaring matukoy kung ang iyong motor ay tatakbo na may isang mas mababang boltahe. Kung nangyari ito, nai-save mo ang iyong sarili ng maraming problema, kung hindi, may iba pang mga paraan ng pagbagal ng mga motor. Ang ilang mga motor na matulin ang bilis ay maaaring magamit kung ginagamit ang mga gears ng worm o mga tornilyo.
Ang isang halimbawa ng gear ng tornilyo ay makikita sa paglalarawan ng robotic arm. Kapag ang motor ay lumiliko pakanan, ang bolt na pagpupulong ay hinila sa motor at kumontrata ang braso at kapag lumipat ito ng pakaliwa, ang braso ay umaabot. Bagaman ang motor shaft ay mabilis na nagiging, ang pagkilos ng braso ay mas mabagal dahil sa pagbawas ng tornilyo. Sa sumusunod na ilustrasyon ng motor circuit, nakikita namin ang isang DC motor na kinokontrol ng isang transistor ng kuryente. Ang isang relay switch (Double Pole Double Throw), tumutukoy sa direksyon. Ang Transistor Q1 ay dapat na isang power transistor upang kunin ang mabibigat na karga ng isang motor.
Pulsed Motors
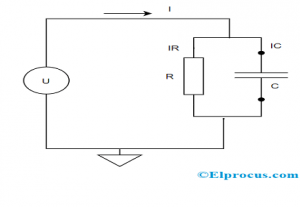
Ang ilang mga motor ay nakakuha ng pagbawas ng bilis sa pamamagitan ng pagpapatakbo mula sa isang pulsed DC signal. Ang senyas na ito ay karaniwang tungkol sa isang daang Hz. Ang bilis ng motor ay maaaring mabago sa pamamagitan ng pagbabago ng lapad ng pulso, hindi sa pamamagitan ng pagbabago ng dalas ng pulso. Ang mga motor na tulad nito ay matatagpuan sa labis na mga tindahan ng electronics at madaling makilala ng generator ng pulso na konektado dito. Ang anumang DC motor ay maaaring hinimok ng isang mapagkukunan ng pulso bagaman, at isang iskema ng tulad ng isang circuit ay kasama.
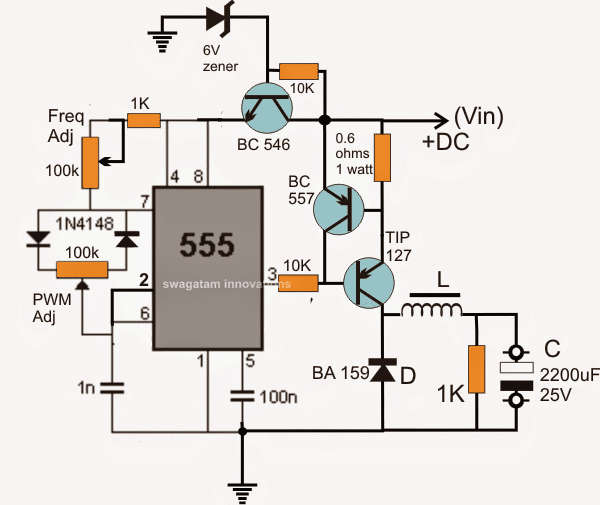
Tulad ng nakikita mo isang 555 timer ay napili bilang oscillator ng drive, na gumagawa ng dalas na humigit-kumulang na 100 Hz. Ang Resistor R1, at capacitor C, ay nagpapatatag at ihiwalay ang generator ng pulso mula sa mga spike na ginawa ng motor. Dahil ang aparato na ito ay maaaring gumuhit mula sa isang supply ng kuryente na 6 hanggang 12 volts, baka gusto mong baguhin ang halaga ng capacitor C4 at C6 para sa mas mahusay na mga resulta, depende sa kung anong boltahe ang iyong ginagamit. Ang output ng pulso ay kinuha mula sa pin three ng IC1 at pinakain sa pin na dalawa sa IC2, isang 555 timer din.
Ang ikalawang timer ay nag-iiba-iba ang lapad ng pulso sa pamamagitan ng pag-aayos ng boltahe na pinakain sa capacitor C6 sa pamamagitan ng potentiometer R5 at risistor R6. Ang tagal ng pulso ay kung ano ang tumutukoy sa bilis ng motor at ang lapad ng pulso ay maaaring maiakma mula 10% hanggang 100%.
Natatanggap ng Transistor Q1 ang lapad ng pulso na naka-modulate na signal sa pamamagitan ng risistor R7. Dahil ang Q1 ay isang mababang kasalukuyang aparato, ipinapasa nito ang signal sa Q2, isang power transistor na maaaring hawakan ang kasalukuyang mga hinihingi ng motor. Ang mga transistors na ito ay hindi kritikal at halos anumang uri ng low-kasalukuyang power transistor ay gagana. Tutukuyin ng relay kung anong direksyon ang dadalhin ng motor.
Mga Stepper Motors
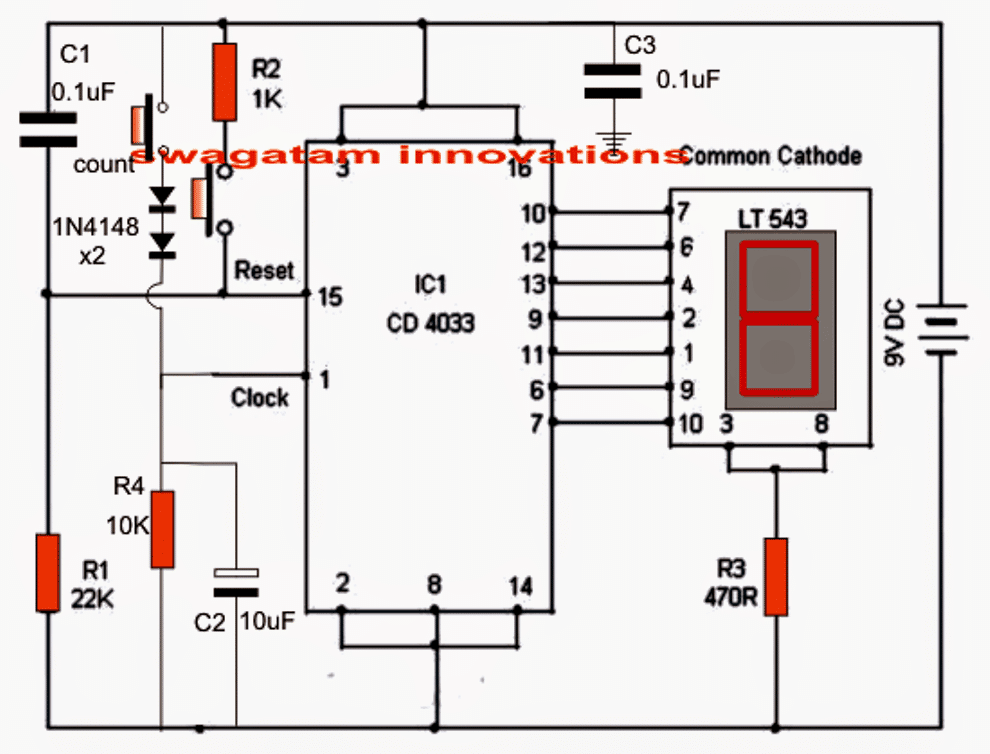
Ang pinaka-kumplikado sa lahat ng mga motor ay ang stepper motor. Tulad ng infers ng pangalan, ang motor ay lumiliko sa mga pagtaas ng degree at pinapatakbo ang pulso. Ang eksaktong antas ng pagliko bawat hakbang ay maaaring magkakaiba mula sa isang tagagawa o modelo patungo sa isa pa, ngunit ang 20 degree ay popular at gumagawa ng 18 mga hakbang para sa isang kumpletong pagliko. Mayroong dalawang pangunahing uri ng mga stepper motor, bipolar at unipolar. Tulad ng nakikita mo sa skemang stepper motor, ang bipolar ay simpleng isang motor na pinapatakbo ng coil.
Ang unipolar na uri ay dalawang coil na may mga center taps. Kung hindi pinapansin ang gitnang mga tapik, ang unipolar motor ay maaaring gumana bilang isang uri ng bipolar. Ang dalawang coil sa isang stepper motor ay pinakain ng pulso ng hakbang na halili sa polarity mula sa coil hanggang sa coil. Ang isang mapa ng prosesong ito ay ibinibigay sa gumaganang diagram upang graphic na kumatawan sa pagkilos ng motor. Hindi tulad ng maginoo DC motor, ang metalikang kuwintas ay bumababa nang may bilis. Kinakailangan din ang isang espesyal na uri ng yunit ng pagmamaneho upang isulong ang stepper motor at dapat ay ibigay sa motor. Hindi inirerekumenda na bumuo ka ng isang control unit maliban kung ang motor ay bibigyan ng isang mahusay na spec sheet na may mga rekomendasyon ng bahagi at buong eskematiko.
Maaaring kailanganin ng motor ang mga buffer na ihiwalay ito mula sa system ng drive, o maaaring mangailangan ng isang hiwalay na supply ng kuryente. Anuman ang mga pangangailangan, maaari silang magkakaiba-iba mula sa isang motor patungo sa isa pa. Ang mga libangan na tindahan ay ang pinaka maaasahang mga tagatustos ng mga stepper motor, at bagaman ang labis na mga elektronikong tindahan ay maaaring magkaroon ng mga ito paminsan-minsan, maaaring hindi nila isama ang kinakailangang impormasyon ng ispek
Bahagyang Lumiliko Motors
Ang ilang mga robotic function ay nangangailangan lamang ng isang bahagyang pagliko, tulad ng paggalaw ng ulo o braso. Ang pinakamadaling paraan upang makamit ang mga ito ay ang paghinto ng posisyon at mga slip gear. Ang isang paglalarawan ng mga detalye ng mekanikal ng ganitong uri ng motor ay ibinibigay sa itaas. Ang mga micro-switch ay maaaring magamit bilang mga stop sensor upang patayin ang kuryente at i-reset ang direksyon para sa susunod na pagkilos.
Ang ilalim na gulong ay konektado sa motor habang ang pang-itaas na gulong ay pinaghiwalay mula sa ibabang gulong ng isang pabilog na piraso ng naramdaman. Kapag ang ilalim ng gulong ay lumiliko ang tuktok na gulong ay lumiliko kasama nito hanggang sa ang contact pin ay makipag-ugnay sa micro-switch. Ang ilang mga disenyo ay hindi gumagawa ng mga probisyon para sa pagpapahinto ng motor, kaya ang mga simpleng turnilyo na may mga spacer ay gagana bilang mga paghinto ng motor.
Bio-Motor
Ang Bio-metal ay isang kamangha-manghang sangkap na nasa paligid ng ilang taon at mayroon itong bilang ng mga application sa larangan ng robotics. Maaari nating makita sa ilustrasyon, na ang isang piraso ng kawad na bio-metal ay magpapaliit ng limang porsyento ng haba nito kapag ilang volts lamang ang inilapat sa kabuuan nito. Matapos ang mga taon ng pagsubok, ang bio-wire ay napatunayan na maging malakas, maaasahan, at nagiging mas kapaki-pakinabang sa paglitaw ng mga bagong produkto. Ang medyo mabagal na oras ng pagtugon ay ginagawang perpekto para sa robotic na mga aplikasyon ng braso at kamay, kung saan ang pagiging maselan ay magiging problema. Ang isang mahabang piraso ng kawad ay maaaring makagawa ng isang makabuluhang kilusan kapag na-uunat ang buong haba ng isang robotic arm. Mayroong mga robotic arm kit na kasalukuyang nasa komersyal na merkado na gumagamit ng bio metal.
Bhaskar Singh
Executive Executive
 Ang mga pang-industriya na robot ay mga aparato na kung saan sa isang tiyak na lawak ay dinoble ang paggalaw ng tao kasama ang pagbabawas ng panganib, na nagbibigay ng higit na lakas, kawastuhan at pagpapatuloy. Kailangan nila ng malawak na hanay ng mga paggalaw na hinihimok ng motor depende sa kanilang mga mode sa pagpapatakbo, pagkontrol, ginamit na mga tool at trabaho na dapat gampanan. Ang isang pang-industriya na robot na motor ay dapat magkaroon ng potensyal na hawakan ang isang malawak na hanay ng mga tungkulin kaysa sa normal na mga motor upang magpakadalubhasa sa isang partikular na gawain.
Ang mga pang-industriya na robot ay mga aparato na kung saan sa isang tiyak na lawak ay dinoble ang paggalaw ng tao kasama ang pagbabawas ng panganib, na nagbibigay ng higit na lakas, kawastuhan at pagpapatuloy. Kailangan nila ng malawak na hanay ng mga paggalaw na hinihimok ng motor depende sa kanilang mga mode sa pagpapatakbo, pagkontrol, ginamit na mga tool at trabaho na dapat gampanan. Ang isang pang-industriya na robot na motor ay dapat magkaroon ng potensyal na hawakan ang isang malawak na hanay ng mga tungkulin kaysa sa normal na mga motor upang magpakadalubhasa sa isang partikular na gawain.
Ang mga de-kuryenteng motor ay karaniwang ginagamit sa mga robot na pang-industriya dahil sa lubos na mahusay na pagkuha ng kuryente at simpleng pagdidisenyo na ginagawang mas tanyag sa kanila ang pagpipilian sa mga termino na marka ng gastos sa pagganap sa lahat ng aspeto - pag-install, pagpapanatili at paglilingkod.
Nakasalalay sa trabaho na kinakailangan, iba't ibang mga motor ang ginagamit para sa iba't ibang mga layunin. Halimbawa DC motor ay ginagamit para sa mga paggalaw sa pakaliwa at anticlockwise na direksyon, ang mga halimbawa ay nasa mga crane at hoist, ang mga pulso na motor ay ginagamit upang magbigay ng mga paggalaw na pulso gamit ang lapad ng pulso ng DC, ginagamit ang bahagyang pagliko ng mga motor upang magbigay ng ulo at braso tulad ng mga paggalaw at pinaka kumplikado - Ang mga stepper motor ay ginagamit upang magbigay ng mga stepped na liko sa mga pagtaas sa degree.
Bukod dito, depende sa uri ng trabaho, ang mga motor na may iba't ibang mga rating at sukat ay ginagamit para sa iba't ibang mga layunin. Mayroong maraming mga uri ng motor bawat isa ay may iba't ibang mga application sa iba't ibang mga lugar depende sa disenyo ng trabaho at robot.
Mohan Krishna. L
Sales at Support Executive
Ginagamit ang mga robot upang gawin ang trabahong maaaring magawa ng mga tao at maraming mga kadahilanan kung bakit mas mahusay ang mga Robot kaysa sa Mga Tao. 
Mayroong dalawang pangunahing uri ng Robot na sila ay: -
Mobile Robot: Gumagalaw iyon sa mga binti o track.
Nakatigil na Robot: Mayroon itong nakapirming base.
Ang mga nakatigil na robot ay karaniwang magagamit ng Robot Arms para sa pagpili ng mga bagay o paggawa ng ibang trabaho na nagsasangkot ng pag-abot sa isang bagay.
Ang isang Robot Arm ay may tatlong pangunahing mga bahagi: -
- Magkasanib na balikat
- Pinagsamang pulso
- Naayos na base
Kailangan mo ng robot para sa
- Kakayahang magtrabaho nang mabilis at Mapanganib na kapaligiran.
- Kakayahang ulitin ang mga gawain nang paulit-ulit.
- Kakayahang gumana nang tumpak.
- Kakayahang gumawa ng iba`t ibang mga gawain.
- Kahusayan.
Ang motor ay isang aparato na nagko-convert ng elektrikal na enerhiya sa mekanikal na enerhiya, ibig sabihin, electro-mechanical device. Mayroong dalawang uri ng motor tulad ng AC Motor at DC Motor
Ang Motor na ginamit sa pang-industriya na Robotics ay Servo Motor. Ang Servo motor ay isang simpleng de-koryenteng motor na kinokontrol sa tulong ng mekanismo ng servo. Kung ang kontroladong motor ay pinapatakbo ng AC, tinatawag itong AC Servo motor kung hindi man DC Servo motor. Karamihan sa mga motor na servo ay maaaring paikutin ang tungkol sa 90 hanggang 180 degree. Kahit na ang ilang paikutin isang buong 360 degree o higit pa. Ang ilan sa mga Aplikasyon ng servo motor sa Robotics ay
- Ang application ng Servo motor sa robotic ibig sabihin, Isang simpleng pick and place robot, ginagamit ito upang pumili ng isang bagay mula sa isang posisyon at ilagay ang bagay sa magkakaibang posisyon.
- Servo motor sa Conveyors ang ginagamit
- sa pang-industriya na Paggawa at pag-iipon ng mga yunit upang maipasa ang isang bagay mula sa isang istasyon ng pagpupulong sa isa pa. Para sa Hal: - Isang proseso ng Pagpuno ng Botelya.
- Servo motor sa Robotic na sasakyan dito ang Servo motor na ginamit sa Gulong. Dahil ang tuluy-tuloy na pag-ikot servo motor ay ginagamit.
Dinesh.P
Executive Executive
 Ipinakikilala ang mga robot upang mabawasan ang pagsusumikap ng tao at makatulong na lumikha ng magandang kapalaran sa mga tao para sa mga susunod na pag-unlad. Ang term na robots ay nangangahulugang ang makina na tumutulad sa iba't ibang mga katangian ng tao. Kasama sa Robotics ang kaalaman sa mechanical, electronics, electrical & Computer science engineering. Ang mga motor na ginamit sa Robots ay ang DC Motors, Stepper Motors at Servo Motors
Ipinakikilala ang mga robot upang mabawasan ang pagsusumikap ng tao at makatulong na lumikha ng magandang kapalaran sa mga tao para sa mga susunod na pag-unlad. Ang term na robots ay nangangahulugang ang makina na tumutulad sa iba't ibang mga katangian ng tao. Kasama sa Robotics ang kaalaman sa mechanical, electronics, electrical & Computer science engineering. Ang mga motor na ginamit sa Robots ay ang DC Motors, Stepper Motors at Servo Motors
Kung saan,
- Ginagamit ang DC Motors para sa tuluy-tuloy na Pag-ikot
- Ginamit ang Stepper Motors para sa pag-ikot sa ilang degree
- Ginagamit ang Servo Motors para sa pagpoposisyon, maaari itong magamit sa mga kotse at eroplano
Ganesh .J
Executive Executive 
Ginagamit ang mga robot upang gawin ang trabaho na maaaring magawa ng mga tao at binabawasan din ang pagsisikap at oras ng tao at pagbutihin ang kalidad. Ang mga motor na ginagamit sa pang-industriya na robot ay
- Mga alternatibong Kasalukuyang (AC) Motors
- Mga Motorsang Direkta-Kasalukuyang (DC)
- Mga Servo Motors
- Mga Stepper Motors.




![Atmospheric Pressure Indicator Circuit [LED Barometer Circuit]](https://electronics.jf-parede.pt/img/3-phase-power/40/atmospheric-pressure-indicator-circuit-led-barometer-circuit-1.jpg)