Sa pag-unlad ng mga teknolohiya lalo na sa robotic na teknolohiya, nangingibabaw ang mga robot sa marami sa mga application. Ang ilan sa mga iyon ay nasa isang mapanganib na uri at mapanganib na mga lugar. Ang mga aplikasyon ng militar at larangan ng digmaan ay lumalaki ngayon sa kanilang paggamit ng mga robot sa ilang mga mahalaga at kumplikadong gawain. Sa isa sa aking mga artikulo, inilarawan ko ang paggamit ng Robots bilang isang tiktik sa mga operasyon ng militar. Ngayon, paano kung mayroong pangangailangan para sa pagtatanggol ng ang robotic na sasakyan o isang atake ng robot? Doon dumating ang pangangailangan para sa isang robot na naka-embed na may mekanismo ng pag-atake. Ang isang tulad halimbawa ay ang robotic na sasakyan na may isang LASER na baril.

Kinokontrol ng RF ang Robotic Vehicle na may pag-aayos ng Laser beam
Ang ganitong robot ay karaniwang ginagamit sa mga pagpapatakbo ng militar at ng mga pulis sa trapiko upang makita ang bilis ng paglipat ng mga sasakyan.
Bago pumunta sa mga detalye tungkol sa Mga Robot na may Laser na baril, ipaalam sa amin ang isang mabilis na pag-unawa sa LASER bilang isang sandata.
Ang isang LASER (Light Amplification by Stimulation Emission) na sinag ay isang uni-directional na matindi na nakatuon na ilaw hindi katulad ng isa mula sa isang simpleng bombilya. Binubuo ito ng mga naka-synchronize na labangan at tuktok, ibig sabihin, ang mga alon ay hindi makagambala sa bawat isa. Gumagawa ito ng isang matindi na nakatuon na ilaw ng napakataas na lakas ng pagkakasunud-sunod ng 1000 hanggang 1 milyong beses na mas malaki kaysa sa isang karaniwang ilaw na bombilya. Ito ay isang aparato na kumokontrol sa paglabas at pagsipsip ng mga photon sa pamamagitan ng pagbomba ng sapat na dami ng enerhiya. Sa ito, ang mapagkukunan ng mga photon ay pinalakas sa isang sinag ng ilaw. Ang haba ng daluyong ng mga laser na ito ay iba-iba sa iba't ibang mga spectrum tulad ng nakikita, infrared, at ultraviolet.
Ang prinsipyo sa likod ng LASER ay umiikot sa tatlong bagay na iyon ay ang pagsipsip, kusang paglabas, at stimulated emission. Ang isang sapat na dami ng enerhiya mula sa foton ay nakikipag-ugnay sa atom, na sanhi ng paglukso ng atom mula sa mas mababang estado ng enerhiya patungo sa mas mataas na estado ng enerhiya. Ang atom na ito ay nababalik sa mas mababang estado ng enerhiya sa pamamagitan ng pagpapalabas ng isang photon na tinatawag na kusang paglabas. Sa stimulated emission ay ang pagpapalabas ng enerhiya mula sa atom sa pamamagitan ng artipisyal na pamamaraan. kaya ang foton ay nakikipag-ugnay sa nasasabik na atomo, ay may parehong enerhiya at polariseysyon tulad ng pangyayari na photon.
Ngayon tingnan natin ang Mga Bahagi ng Hardware ng Robot
- Base: Ang base ng naturang robot ay maaaring maging anumang cubical body na may mga gulong na nakakabit para sa paggalaw nito.
- DC Motor: Ang robot ay binubuo ng dalawang DC motor na hinimok ng mga driver ng motor at nagbibigay ng kinakailangang paggalaw sa robot.
- Control Unit: Ang paggalaw ng robot ay kinokontrol gamit ang isang module ng komunikasyon ng RF. Ang transmiter ay binubuo ng mga pushbuttons, microcontrollers, isang decoder, at isang RF transmitter samantalang ang unit ng tatanggap na naka-embed sa robot ay binubuo ng isang encoder at RF module ng tatanggap upang makontrol ang robotic na paggalaw .
- Isang LASER na baril: Ang isang LASER na baril ay naka-mount sa robot na nagsasagawa ng pangunahing gawain ng robot.
Isang Sneak Peek sa Robot na Nagtatrabaho
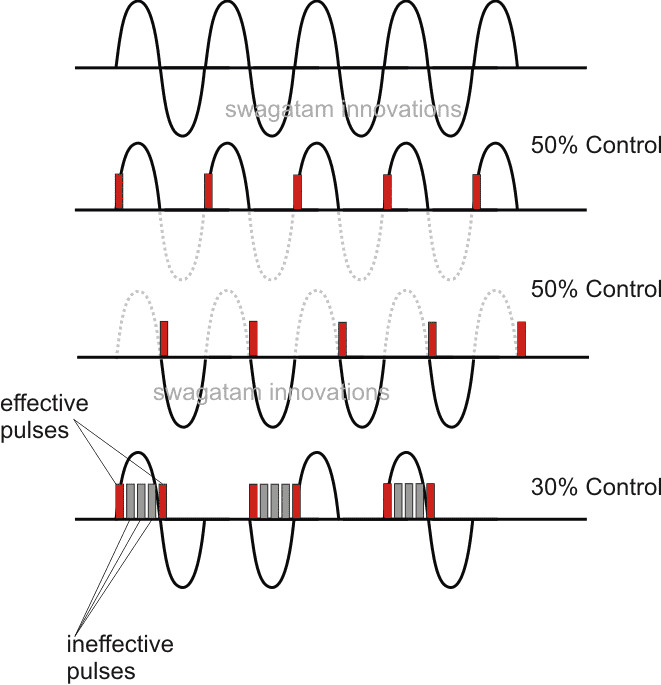
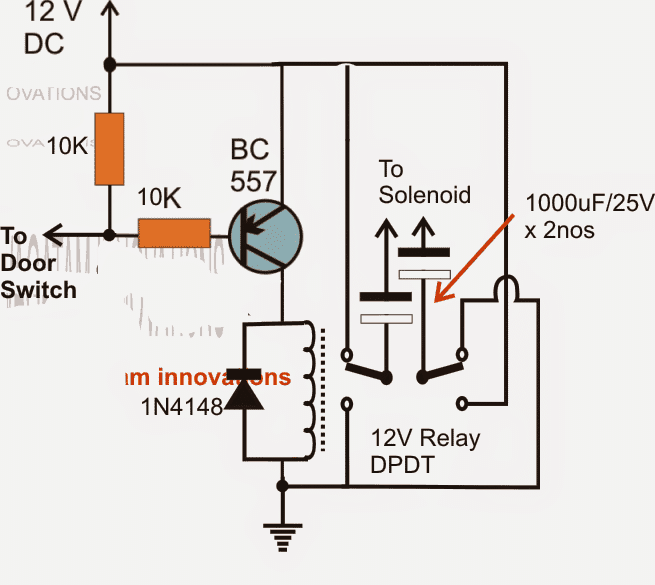
Ang robot habang gumagalaw sa kinakailangang direksyon ay nag-shoot ng isang malakas na light beam mula sa LASER gun na maaaring makapinsala sa target o makagawa lamang ng isang lugar upang makita ang target. Ang LASER ay kailangang hinimok ng ilang mga mapagkukunan ng enerhiya. Sa isang simpleng disenyo ng prototype gamit ang isang pangunahing pen ng LASER, ang aparato ay hinihimok ng isang transistor na kumikilos bilang isang switch. Ang transistor ay tumatanggap ng mababang signal ng lohika mula sa microcontroller at wala sa kondisyon, na ginagawang direktang konektado sa 5 V power supply ang module ng LASER.

Ang Laser Gun ay Pinatakbo ng Transistor Nagtatrabaho bilang isang Inverter
Pagkontrol sa Robot
Upang makontrol ang paggalaw ng robot, kailangang makontrol ang pagpapatakbo ng mga motor. Maaari itong magawa gamit ang isang kontroladong pagpapatakbo ng RF ng mga driver ng motor. Ang mga utos ay ipinapadala gamit ang isang RF transmitter sa ilang distansya unit na halos 200 metro at natanggap ng RF receiver upang himukin ang mga motor.
Ang unit ng transmiter ay binubuo ng maraming mga pindutan ng push na kumilos bilang switch ng utos upang ilipat ang robot sa anumang nais na direksyon. Ang mga pushbutton ay naka-interfaced sa microcontroller, na na-program upang magpadala ng data sa parallel form batay sa push-button input, sa encoder. Ino-convert ng encoder ang parallel data na ito sa serial form at ang serial data na ito ay naipadala gamit ang RF transmitter module sa pamamagitan ng isang antena.

Block Diagram Ipinapakita ang Seksyon ng Transmitter
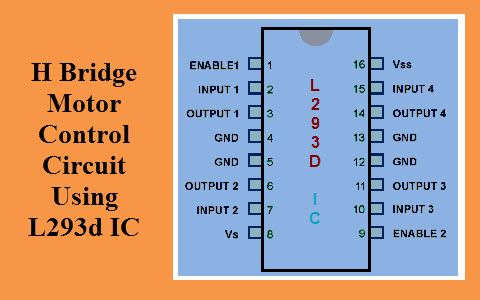
Ang yunit ng tatanggap ay binubuo ng isang module ng RF receiver na tumatanggap ng na-modulate na signal at na-demodulate ito. Natanggap ng decoder ang naka-demodulate na signal sa serial form at pinapalitan ito sa parallel form. Tumatanggap ang microcontroller ng mga signal at kinokontrol ang driver ng motor nang naaayon. Ang driver ng motor na ginamit sa LM293D na maaaring makontrol ang 2 motor nang paisa-isa.

Ipinapakita ang Block Diagram na seksyon ng Tagatanggap
Sa gayon gumagamit ng komunikasyon sa RF maaari nating makontrol ang robot.
Sa mga paglalarawan sa itaas, nagbigay ako ng isang maikling ideya tungkol sa isang simpleng prototype ng isang Robotic Vehicle na may isang LASER beam. Sa mga application na totoong buhay, karaniwang ginagamit ang mga malayuan na sistema ng komunikasyon tulad ng GSM o DTMF upang makontrol ang robot mula sa mga malalayong lugar.
3 Mga Aplikasyon ng Robotic Vehicle na may Laser Gun:
- Pagtuklas ng Target : Maaaring magamit ng robotic na sasakyan ang sinag ng LASER upang maging sanhi ng isang lugar sa target, tulad na ito ay madaling makita at maaaring ma-target. Ang isang halimbawa ay ang Air Borne LASER.
- Target na Pagkawasak : Isang malakas LASER beam ng pagkakasunud-sunod ng dalas ng 95GHz ay maaaring maging sanhi ng isang nasusunog na sensasyon sa katawan ng tao habang tumagos ito sa balat ng 1/64ikang isang pulgada at ang enerhiya ng sinag ay maaaring magpainit ng mga molekula ng tubig sa katawan. Ang isang halimbawa ay ang Active Denial System na binuo ng USA.
- Target na Finder ng Saklaw at pagtuklas ng bilis : Ang LASER beam mula sa robotic na sasakyan ay maaaring magamit upang mahanap ang saklaw ng target sa pamamagitan ng prinsipyo ng LASER light mirror at din ang bilis ng target ay maaaring makalkula sa sandaling makuha natin ang saklaw.
Kaya ngayon mayroon kaming isang maikling ideya tungkol sa Robots na gumamit ng isang target detector at mananaklag. Mayroon bang paggamit para sa normal na publiko bukod sa militar lamang? Isipin at sagutin.