Ang robotic arm circuit na ito na maaari ring ipatupad tulad ng isang robotic crane, gumagana gamit ang 6 servo motor at maaaring makontrol sa pamamagitan ng isang remote control ng microcontroller , gamit ang isang Arduino batay sa 2.4 GHz na link sa komunikasyon.
Pangunahing Mga Tampok
Kapag nagtatayo ka ng isang bagay na sopistikado bilang isang robotic arm, dapat itong magmukhang moderno at dapat magsama ng maraming mga advanced na tampok, at hindi lamang isang laruan tulad ng mga pagpapaandar.
Ang ipinanukalang buong disenyo ay medyo madali upang maitayo, ngunit ito ay naiugnay sa ilang mga advanced na pagpapaandar ng maneuvering, na maaaring tiyak na makontrol sa pamamagitan ng mga wireless o remote control na utos. Ang disenyo ay kahit na katugma para sa pang-industriya na paggamit, kung ang mga motor ay angkop na na-upgrade.
Ang mga pangunahing tampok ng mechanical crane na ito tulad ng robotic arm ay:
- Patuloy na naaayos na 'braso' higit sa 180 degree na patayong axis.
- Patuloy na naaayos na 'siko' sa isang 180 degree na patayong axis.
- Patuloy na naaayos na 'kurot ng daliri' o Grip sa isang 90 degree na patayong axis.
- Patuloy na naaayos na 'braso' sa isang 180 degree na pahalang na eroplano.
- Ang buong robotic system o ang braso ng crane ay maaaring ilipat at mailipat tulad ng a remote control car .
Magaspang na Simulation sa Paggawa
Ang ilan sa mga tampok na ipinaliwanag sa itaas ay maaaring matingnan at maunawaan sa tulong ng sumusunod na simulation ng GIF:

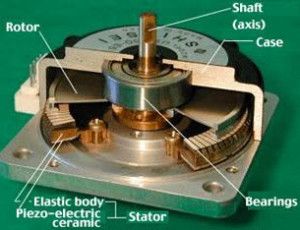
Mga Posisyon ng Mekanismo ng Motor
Binibigyan kami ng sumusunod na figure ng malinaw na larawan tungkol sa iba't ibang mga posisyon sa motor at mga kaugnay na mekanismo ng gear na kailangang mai-install para sa pagpapatupad ng proyekto:

Sa disenyo na ito, tinitiyak namin na panatilihing simple ang mga bagay hangga't maaari upang kahit na ang isang layman ay maaaring maunawaan tungkol sa mga kasangkot na mekanismo ng motor / gear. at walang nananatiling nakatago sa likod ng mga kumplikadong mekanismo.
Ang paggana o pag-andar ng bawat motor ay maaaring maunawaan sa tulong ng mga sumusunod na puntos:
- Kinokontrol ng Motor # 1 ang 'kurot ng daliri' o ang gripping system ng robot. Ang elemento na maililipat ay direktang hinged ng baras ng motor para sa mga paggalaw.
- Kinokontrol ng motor # 2 ang mekanismo ng siko ng system. Naka-configure ito sa isang simpleng gilid upang egde gear system para sa pagpapatupad ng paggalaw ng pag-angat.
- Ang Motor # 3 ay responsable para sa pag-angat ng buong patayo ng robotic system, samakatuwid ang motor na ito ay kailangang maging mas malakas kaysa sa dalawang nasa itaas. Ang motor na ito ay isinama din gamit ang mekanismo ng mga gears para sa paghahatid ng kinakailangang mga pagkilos.
- Kinokontrol ng Motor # 4 ang buong mekanismo ng crane sa isang buong 360 degree na pahalang na eroplano, upang ang braso ay makapili o maiangat ang anumang bagay sa loob ng buong pakaliwa o anticlock saklaw ng radial.
- Ang motor # 5 at 6 ay kumikilos tulad ng mga gulong para sa platform na nagdadala ng buong system. Ang mga motor na ito ay maaaring makontrol sa pamamagitan ng paglipat ng system mula sa isang lugar patungo sa iba pang walang kahirap-hirap, at pinapabilis din nito ang silangan / kanluran, hilaga / timog na paggalaw ng system sa pamamagitan lamang ng pagsasaayos ng mga bilis ng kaliwa / kanang mga motor. Ginagawa lamang ito sa pamamagitan ng pagbawas o pagpapahinto ng isa sa dalawang mga motor, halimbawa upang simulan ang isang kanang bahagi, ang kanang bahagi ng motor ay maaaring mapahinto o tumigil hanggang sa ang turn ay ganap na maipatupad o sa nais na anggulo. Katulad nito, para sa pagpapasimula ng isang kaliwang pagliko gawin ang pareho sa kaliwang motor.
Ang likurang gulong ay walang anumang motor na nauugnay dito, ito ay hinged upang malayang ilipat sa gitnang axis nito at sundin ang mga maneuver sa harap ng gulong.
Ang Wireless Receiver Circuit
Dahil ang buong sistema ay dinisenyo upang gumana sa isang remote control, kailangang mai-configure ang isang wireless receiver na may ipinaliwanag sa itaas na mga motor. At maaari itong gawin gamit ang sumusunod na circuit na nakabatay sa Arduino.

Tulad ng nakikita mo, mayroong 6 na motor na servo na nakakabit sa mga output ng Arduino at ang bawat isa dito ay kinokontrol sa pamamagitan ng mga remote control signal na nakuha ng naka-attach na sensor NRF24L01.
Ang mga signal ay naproseso ng sensor na ito at pinakain sa Arduino na naghahatid ng pagpoproseso sa nauugnay na motor para sa inilaan na pagpapatakbo ng kontrol sa bilis.
Ang mga Thignign ay ipinadala mula sa isang Transmitter circuit na mayroong potentiometers. Kinokontrol ng adjustemenst sa potensyomiter na ito ang mga antas ng bilis sa mga nakakabitin na motor na nakakabit sa nabanggit na circuit ng tatanggap sa itaas.
Tingnan natin ngayon kung paano ang hitsura ng transmitter circuit:
Module ng Transmitter

Makikita ang disenyo ng transmitter na mayroong 6 potentiometer na nakakabit sa Arduino board nito at kasama rin ang isa pang 2.4 GHz na aparato sa pakikipag-ugnay.
Ang bawat isa sa mga kaldero ay na-program para sa pagkontrol ng isang kaukulang motor na nauugnay sa circuit ng receiver. Samakatuwid kapag pinaikot ng gumagamit ang baras ng isang napiling potensyomiter ng transmiter, ang kaukulang motor ng robotic arm ay nagsisimulang gumalaw at nagpapatupad ng mga pagkilos depende sa tukoy nitong posisyon sa system.
Pagkontrol sa sobrang karga ng Motor
Maaari kang magtaka kung paano nililimitahan ng mga motor ang kanilang paggalaw sa kanilang mga maaaring ilipat na mga saklaw, dahil ang system ay walang anumang nililimitahan na pag-aayos para mapigilan ang motor mula sa labis na karga sa sandaling maabot ng kani-kanilang mga paggalaw ng mekanismo ang kanilang mga puntos sa pagtatapos?
Ibig sabihin, halimbawa ano ang mangyayari kung ang motor ay hindi tumitigil kahit na mahawakan ng 'mahigpit' ang bagay nang mahigpit?
Ang pinakamadaling solusyon dito ay upang magdagdag ng indibidwal kasalukuyang mga module ng kontrol sa bawat isa sa mga motor upang sa mga ganitong sitwasyon ang motor ay mananatiling nakabukas at naka-lock nang hindi nasusunog o labis na karga.
Dahil sa isang aktibong kasalukuyang kontrol ang mga motor ay hindi dumaan sa isang labis na karga, o labis na kasalukuyang mga kundisyon, at patuloy silang tumatakbo sa loob ng isang tinukoy na ligtas na saklaw.
Mahahanap ang Kumpletong Program Code sa artikulong ito
Nakaraan: USB 5V Audio Amplifier para sa PC Speaker Susunod: 7 Binago ang Sine Wave Inverter Circuits na ginalugad - 100W hanggang 3kVA