Tinalakay ng artikulo ang isang simpleng infrared (IR) remote control circuit na na-configure para sa pagpapatakbo ng isang DC motor bilang tugon sa paglipat na ginawa mula sa isang karaniwang IR remote handset tulad ng isang TV remote o isang DVD remote.
Ang nakakonektang motor ay maaaring ilipat ang alinman sa mga paraan at maaari ding ihinto.
Maaaring maunawaan ang circuit sa mga sumusunod na paliwanag:
Paano ito gumagana
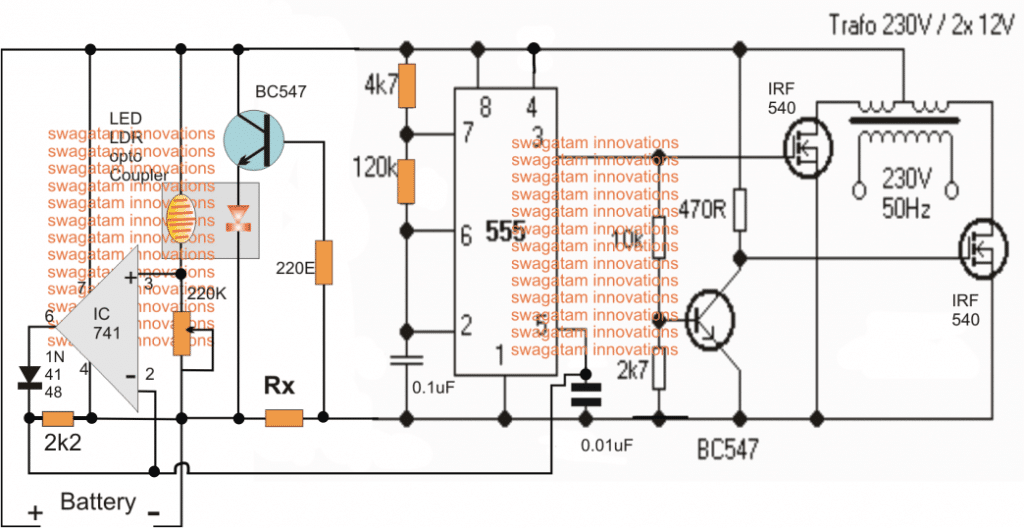
Tulad ng makikita sa ibinigay na diagram ng circuit, ang sensor ay anumang pamantayan ng tatlong pin IR sensor module na karaniwang tumutugon sa anumang TV IR remote handset.
Kapag ang isang IR (infrared) beam ay nakatuon sa sensor, ang pin na itinalaga bilang output ay nagiging mababa sa lohika. Ang sitwasyong ito ay nagpapatuloy hangga't ang sinag ay mananatiling nakatuon dito.
Ang transistor T1 na isang PNP ay tumutugon sa mababang signal ng lohika na ito at nagsasagawa ng paglipat ng nakakabit na relay RL1.
Agad na ikonekta ng mga contact ang instant na positibong potensyal sa kolektor ng transistor upang i-pin ang # 14 ng IC1 na naka-wire bilang isang flip flop circuit.
Ipagpalagay na ang paunang pagkakasunud-sunod ng lohika ay nasa pin # 3 ng IC, sa itaas na nagpapalitaw ay binabago ang pagkakasunud-sunod sa pin # 2 ng IC, ginagawa itong mataas.
Lumilipat ito sa ON T2 at ang kaukulang relay RL2.
Ang RL2 ay nagsasagawa at nagkokonekta sa partikular na kawad ng motor sa negatibong supply. Dahil ang ibang terminal ng motor ay nakakakuha ng positibo mula sa RL3, nagsisimula itong gumalaw sa itinakdang direksyon.
Ipagpalagay ngayon, ang sensor ay binibigyan ng kasunod na pag-trigger sa pamamagitan ng IR remote handset, inuulit ang proseso sa itaas at ang pagkakasunud-sunod ng output ay lumipat mula sa pin # 2 hanggang sa pin # 4 ng IC1, na agad na lumilipat SA T3 habang inililipat ang OFF T2
Ang aksyon sa itaas ay ibabalik ang mga koneksyon ng relay na pinipilit ang motor na agad na i-flip ang direksyon ng pag-ikot nito.
Sa isa pang kasunod na pag-trigger mula sa malayuang handset, ang pagkakasunud-sunod ay nagba-bounce pabalik sa pin # 3, na hindi konektado sa anumang bagay at nagreresulta sa ganap na pag-off ng motor.
Ang pagsasama ng L1, C1 ay nagsisiguro na ang mga circuit ay hindi naiimpluwensyahan ng maling pag-trigger ng sensor.
Maaaring i-eksperimento ang L1 upang makuha ang pinakamainam na halaga upang ito ay 'saligan' lamang ng hindi sinasadyang maligalig na mga panlabas na signal at hindi ang tunay na mga signal ng IR mula sa isang handset ng remote control.


Listahan ng Mga Bahagi para sa itaas ng IR (infra red) na remote control motor circuit.
R1 = 100 ohms,
R2 = 1K
R3, R4, R5, R6, R7 = 10K
C1, C4, C6 = 100uF / 25V
C2, C3, C7 = 0.22uF
C5 = 1000uF / 25V
C6 = 0.22uF
L1 = 100mH nasakal
T1 = BC557
T2, T3 = BC547
D1 --- D7 = 1N4007
IC1 = IC4017
IC2 = 7812
Lahat ng mga relay = 12V / 400 ohms / SPDT
sensor = TSOP1738
Motor = 12V Dc motor
Nakaraan: Paggamit ng isang NTC Thermistor bilang isang Surge Suppressor Susunod: MJE13005 Compact 220V Power Supply Circuit







![4 Simple Clap Switch Circuits [Nasubukan]](https://electronics.jf-parede.pt/img/4017-ic-circuits/21/4-simple-clap-switch-circuits.png)