Sa panahon ng 18ikasiglo mismo, nagkaroon ng ebolusyon ng DC motors. Ang pag-unlad ng DC Motors ay malawak na pinahusay at ang mga ito ay makabuluhang inilapat sa maraming mga industriya. Sa maagang panahon ng mga taong 1800 at kasama ang mga pagpapahusay na nagawa noong taong 1832, ang mga DC motor ay paunang binuo ng mananaliksik na British na si Sturgeon. Inimbento niya ang paunang uri ng commutator ng DC motor kung saan may kakayahan itong gayahin din ang makinarya. Ngunit maaaring magtaka ang isa kung ano ang pagpapaandar ng motor na DC at kung bakit mahalagang malaman ang tungkol sa kontrol sa bilis ng motor ng DC. Kaya, malinaw na ipinapaliwanag ng artikulong ito ang pagpapatakbo nito at iba't ibang mga diskarte sa pagkontrol ng bilis.
Ano ang DC Motor?
Ang isang Dc motor ay pinamamahalaan sa pamamagitan ng paggamit ng direktang kasalukuyang kung saan binabago nito ang natanggap na elektrikal na enerhiya sa mekanikal na enerhiya. Nagpapalitaw ito ng isang paikot na pagbabago sa mismong aparato kung kaya naghahatid ng lakas upang mapatakbo ang iba't ibang mga application sa maraming mga domain.
Ang kontrol sa bilis ng motor ng DC ay isa sa mga pinaka kapaki-pakinabang na tampok ng motor. Sa pamamagitan ng pagkontrol sa bilis ng motor, maaari mong ibahin ang bilis ng motor alinsunod sa mga kinakailangan at makuha ang kinakailangang operasyon.
Ang mekanismo ng pagkontrol ng bilis ay naaangkop sa maraming mga kaso tulad ng pagkontrol sa paggalaw ng mga robotic na sasakyan, paggalaw ng mga motor sa mga galingan ng papel, at paggalaw ng mga motor sa mga elevator kung saan iba't ibang mga uri ng DC motors ay ginamit.
Prinsipyo sa Paggawa ng DC Motor
Gumagawa ang isang simpleng DC motor sa prinsipyo na kapag ang isang kasalukuyang nagdadala ng konduktor ay inilalagay sa a magnetikong tapat d, nakakaranas ito ng isang lakas na mekanikal. Sa isang praktikal na DC motor, ang armature ay ang kasalukuyang nagdadala ng conductor at ang patlang ay nagbibigay ng isang magnetic field.
Kapag ang conductor (armature) ay ibinibigay ng isang kasalukuyang, gumagawa ito ng sarili nitong magnetic flux. Ang magnetic flux ay alinman sa nagdaragdag hanggang sa magnetic flux dahil sa mga paikot-ikot na patlang sa isang direksyon o kinansela ang magnetic flux dahil sa pag-ikot ng patlang. Ang akumulasyon ng magnetic flux sa isang direksyon kumpara sa iba pang mga lakas ay nagbibigay ng isang lakas sa conductor, at samakatuwid, nagsisimula itong umiikot.
Ayon sa batas ni Faraday ng electromagnetic induction, ang umiikot na aksyon ng conductor ay gumagawa ng isang EMF . Ang EMF na ito, ayon sa batas ni Lenz, ay may gawi na salungatin ang sanhi, ibig sabihin, ang ibinibigay na boltahe. Samakatuwid, ang isang DC motor ay may isang napaka-espesyal na katangian ng pag-aayos ng metalikang kuwintas nito sa kaso ng iba't ibang pagkarga dahil sa likod ng EMF.
Bakit Mahalaga ang DC Motor Speed Control?
Ang kontrol sa bilis sa makina ay nagpapakita ng isang epekto sa bilis ng pag-ikot ng motor kung saan ang direktang impluwensya sa pag-andar ng makina at napakahalaga para sa pagganap at kinalabasan ng pagganap. Sa oras ng pagbabarena, ang bawat uri ng materyal ay may sariling bilis ng pag-ikot at nagbabago ito batay din sa laki ng drill.
Sa senaryo ng mga pag-install ng bomba, magkakaroon ng pagbabago sa rate ng throughput at sa gayon ang isang conveyor belt ay kailangang i-sync sa bilis ng pagganap ng aparato. Ang mga kadahilanang ito ay dumating nang direkta o hindi direktang nakasalalay sa bilis ng motor. Dahil dito, dapat isaalang-alang ng isa ang bilis ng motor ng DC at obserbahan ang iba't ibang uri ng mga pamamaraan ng pagkontrol ng bilis.
Ang kontrol sa bilis ng DC Motor ay ginagawa alinman sa manu-manong ginagawa ng manggagawa o sa pamamagitan ng paggamit ng anumang awtomatikong tool sa pagkontrol. Ito ay tila naiiba sa limitasyon ng bilis kung saan kailangang may regulasyon ng bilis na sumasalungat sa natural na pagkakaiba-iba sa bilis dahil sa pagkakaiba-iba ng load ng poste.
Ang Prinsipyo ng Pagkontrol sa Bilis
Mula sa figure sa itaas, ang equation ng boltahe ng isang simple DC motor ay
V = Eb + IaRa
Ang V ay ang ibinibigay na boltahe, ang Eb ay ang likod ng EMF, Ia ang kasalukuyang armature, at ang Ra ay ang paglaban sa armature.
Alam na natin yan
Eb = (PøNZ) / 60A.
P - bilang ng mga poste,
A - pare-pareho
Z - bilang ng mga conductor
N- ang bilis ng motor
Ang pagpapalit ng halaga ng Eb sa equation ng boltahe, nakukuha namin
V = (PøNZ) / 60A) + IaRa
O, V - IaRa = (PøNZ) / 60A
ibig sabihin, N = (PZ / 60A) (V - IaRa) / ø
Ang equation sa itaas ay maaari ding isulat bilang:
N = K (V - IaRa) / ø, ang K ay isang pare-pareho
Ipinapahiwatig nito ang tatlong bagay:
- Ang bilis ng motor ay direktang proporsyonal upang magbigay ng boltahe.
- Ang bilis ng motor ay baligtad na proporsyonal sa pagbagsak ng boltahe ng armature.
- Ang bilis ng motor ay baligtad na proporsyonal sa pagkilos ng bagay dahil sa mga natuklasan sa patlang
Kaya, ang bilis ng isang motor na DC ay maaaring makontrol sa tatlong paraan:
- Sa pamamagitan ng pag-iiba ng boltahe ng suplay
- Sa pamamagitan ng pag-iba-iba ng pagkilos ng bagay, at sa pamamagitan ng pag-iba-iba ng kasalukuyang pag-ikot ng patlang
- Sa pamamagitan ng pag-iiba ng boltahe ng armature, at sa pamamagitan ng pag-iiba ng paglaban ng armature
Maramihang Mga Diskarte ng DC Motor Speed Control
Tulad ng mayroong dalawang uri ng mga motor na DC, dito malinaw na tatalakayin namin ang mga pamamaraan ng bilis sa pagkontrol ng parehong serye ng DC at shunt motor.
DC Motor Speed Control sa Mga Uri ng Serye
Maaari itong ikategorya sa dalawang uri at ang mga iyon ay:
- Teknikal na kinokontrol ng armature
- Diskarteng kinokontrol ng patlang
Ang diskarteng kinokontrol ng armature ay karagdagang inuri sa tatlong uri
- Kinokontrol ng armature ang paglaban
- Shunted armature control
- Boltahe ng armature terminal
Kinokontrol na Paglaban ng Armature
Ang pamamaraan na ito ay pinaka-malawak na nagtatrabaho kung saan ang pagsasaayos ng paglaban ay may isang koneksyon sa serye sa supply ng motor. Ipinapaliwanag ito ng larawan sa ibaba.

Pagkontrol sa Paglaban ng Armature
Ang pagkawala ng kuryente na nangyayari sa pagkontrol ng paglaban ng motor ng serye ng DC ay maaaring balewalain dahil ang pamamaraan na ito sa pagsasaayos ay kadalasang ginagamit para sa isang mahabang panahon upang mabawasan ang bilis sa oras ng mga magaan na sitwasyon sa paglo-load. Ito ay isang epektibong pamamaraan para sa paulit-ulit na metalikang kuwintas at pangunahing ipinatutupad sa pagmamaneho ng mga crane, tren, at iba pang mga sasakyan.
Shunted Armature Control
Dito, ang rheostat ay magiging sa parehong serye at hindi nakakagulat na koneksyon sa armature. Magkakaroon ng pagbabago sa antas ng boltahe na inilapat sa armature at nag-iiba ito sa pamamagitan ng pagbabago ng serye rheostat . Sapagkat ang pagbabago sa kasalukuyang paggulo ay nagaganap sa pamamagitan ng pagbabago ng shunt rheostat. Ang pamamaraan na ito ng pagkontrol ng bilis sa motor na DC ay hindi gaanong magastos dahil sa makabuluhang pagkalugi ng kuryente sa mga resistensya sa bilis ng regulasyon. Ang bilis ay maaaring makontrol sa ilang sukat ngunit hindi sa itaas ng normal na antas ng bilis.

Shunted Armature DC Pamamaraan ng Pagkontrol ng Bilis ng Motor
Armature Terminal Boltahe
Ang bilis ng isang serye ng motor na DC ay maaari ring gawin sa pamamagitan ng power supply sa motor gamit ang isang indibidwal na iba-ibang boltahe ng suplay, ngunit ang pamamaraang ito ay magastos at hindi gaanong ipinatupad.
Ang diskarteng kinokontrol ng patlang ay higit na nauri sa dalawang uri:
- Field Diverter
- Pagkontrol ng naka-tap na patlang (Tapped control sa patlang)
Pamamaraan ng Field Diverter
Ginagawa ng pamamaraang ito ang isang diverter. Ang rate ng pagkilos ng bagay na nasa buong patlang ay maaaring mabawasan sa pamamagitan ng pag-shunting ng ilang bahagi ng kasalukuyang motor sa buong patlang ng serye. Ang mas mababa ay ang paglaban ng diverter, ang kasalukuyang patlang ay mas mababa. Ang pamamaraan na ito ay ginagamit para sa higit sa normal na saklaw ng mga bilis at ipinatupad sa mga electric drive kung saan tumataas ang bilis kapag may pagbawas sa load.

Pagkontrol ng Bilis ng Patlang DC Motor
Pagkontrol ng Tapped Field
Dito din, sa pagbawas ng pagkilos ng bagay, ang bilis ay madagdagan at magagawa ito sa pamamagitan ng pagbawas sa patlang na paikot-ikot na patlang mula sa kung saan nagaganap ang daloy ng kasalukuyang. Dito, ang bilang ng mga pag-tap sa pag-ikot ng patlang ay kinuha at ang diskarteng ito ay ginagamit sa mga electric traction.
Pagkontrol ng Bilis ng DC Shunt Motor
Maaari itong ikategorya sa dalawang uri at ang mga iyon ay:
- Diskarteng kinokontrol ng patlang
- Teknikal na kinokontrol ng armature
Paraan ng Pagkontrol sa Patlang para sa DC Shunt Motor
Sa pamamaraang ito, ang magnetic flux dahil sa pag-ikot ng patlang ay iba-iba upang maiiba ang bilis ng motor.
Tulad ng magnetic flux ay nakasalalay sa kasalukuyang dumadaloy sa pamamagitan ng paikot-ikot na patlang, maaari itong iba-iba sa pamamagitan ng pag-iba-iba ng kasalukuyang sa pamamagitan ng pag-ikot ng patlang. Maaari itong makamit sa pamamagitan ng paggamit ng isang variable na risistor sa isang serye na may patlang na paikot na risistor.
Sa una, kapag ang variable na risistor ay itinatago sa pinakamababang posisyon nito, ang na-rate na kasalukuyang dumadaloy sa pamamagitan ng paikot-ikot na patlang dahil sa isang na-rate na boltahe ng suplay, at bilang isang resulta, ang bilis ay mapanatiling normal. Kapag ang pagtutol ay nadagdagan nang unti, ang kasalukuyang sa pamamagitan ng pag-ikot ng patlang ay nababawasan. Ito naman ang bumabawas sa nagawang pagkilos ng bagay. Kaya, ang bilis ng motor ay tumataas nang lampas sa normal na halaga nito.
Pamamaraan ng Pagkontrol sa Paglaban ng Armature para sa DC Shunt Motor
Sa pamamaraang ito, ang bilis ng motor na DC ay maaaring makontrol sa pamamagitan ng pagkontrol sa paglaban ng armature upang makontrol ang pagbagsak ng boltahe sa buong armature. Gumagamit din ang pamamaraang ito ng isang variable na risistor sa serye na may armature.
Kapag naabot ng variable na risistor ang pinakamaliit na halaga nito, ang paglaban ng armature ay nasa isang normal, at samakatuwid, ang boltahe ng armature ay bumaba. Kapag ang halaga ng paglaban ay unti-unting nadagdagan, ang boltahe sa buong armature ay bumababa. Ito naman ay humahantong sa pagbawas sa bilis ng motor.
Nakamit ng pamamaraang ito ang bilis ng motor sa ibaba ng normal na saklaw nito.
Pamamaraan ng Pagkontrol ng Boltahe ng Armature para sa DC Shunt Motor (Pamamaraan ng Ward Leonard)
Ang diskarteng Ward Leonard ng DC motor control circuit na bilis ay ipinapakita tulad ng sumusunod:
Sa larawan sa itaas, ang M ay ang pangunahing motor kung saan ang bilis nito ay dapat makontrol at ang G ay tumutugma sa isang indibidwal na nasasabik na DC generator kung saan ito ay hinihimok ng paggamit ng isang tatlong-phase na motor at maaaring ito ay alinman sa magkasabay o induction motor. Ang pattern na ito ng DC generator at kombinasyon ng motor na hinimok ng AC ay tinawag bilang M-G set.
Ang boltahe ng generator ay iba-iba sa pamamagitan ng pagbabago ng kasalukuyang patlang ng generator. Ang antas ng boltahe na ito kapag ibinigay sa seksyon ng armature ng DC motor at pagkatapos ang M ay iba-iba. Upang mapanatili ang pagkilos ng bagay ng patlang ng motor na pare-pareho, ang kasalukuyang patlang ng motor ay dapat mapanatili bilang pare-pareho. Kapag ang bilis ng motor ay kinokontrol, pagkatapos ang kasalukuyang armature para sa motor ay magiging kapareho ng na-rate na antas.
Ang naihatid na kasalukuyang patlang ay magkakaiba upang ang antas ng armature ng boltahe ay magkakaiba mula sa '0' hanggang sa na-rate na antas. Tulad ng regulasyon ng bilis ay tumutugma sa na-rate na kasalukuyang at sa paulit-ulit na pagkilos ng bagay sa patlang ng motor at ang pagkilos ng bagay sa patlang hanggang sa makamit ang na-rate na bilis. At dahil ang lakas ay produkto ng bilis at metalikang kuwintas at mayroon itong direktang proporsyon sa bilis. Sa pamamagitan nito, kapag may pagtaas sa lakas, tumataas ang bilis.
Ang parehong mga nabanggit na pamamaraan ay hindi maaaring magbigay ng kontrol sa bilis sa kanais-nais na saklaw. Bukod dito, ang paraan ng pagkontrol ng pagkilos ng bagay ay maaaring makaapekto sa pagbawas, samantalang ang pamamaraan ng pagkontrol ng armature ay nagsasangkot ng malaking pagkawala ng kuryente dahil sa paggamit nito ng isang risistor sa serye ng armature. Samakatuwid, ang isang iba't ibang paraan ay madalas na kanais-nais - ang isa na kumokontrol sa boltahe ng suplay upang makontrol ang bilis ng motor.
Dahil dito, sa diskarteng Ward Leonard, ang naaayos na power drive at ang pare-pareho na halaga ng metalikang kuwintas ay nakuha mula sa antas ng bilis na minimal hanggang sa antas ng batayang bilis. Ang diskarteng regulasyon sa pagkilos ng pagkilos ng bagay na pangunahin ay pangunahing ginagamit kung ang antas ng bilis ay higit pa sa bilis ng batayan.
Dito, sa pagpapaandar, ang kasalukuyang armature ay itinatago sa isang pare-pareho na antas sa tinukoy na halaga at ang halaga ng boltahe ng generator ay pinananatili nang pare-pareho. Sa gayong pamamaraan, ang patlang na paikot-ikot na natatanggap ng isang nakapirming boltahe, at ang armature ay nakakakuha ng isang variable boltahe.
Ang isang tulad ng pamamaraan ng pagkontrol ng boltahe ay nagsasangkot sa paggamit ng isang mekanismo ng switchgear upang magbigay ng isang variable na boltahe sa armature, at ang isa pa ay gumagamit ng isang AC na hinihimok ng motor na Generator upang magbigay ng variable boltahe sa armature (ang Sistema ng Ward-Leonard ).
Ang bentahe at kawalan ng ward Leonard metho d ay:
Ang mga pakinabang ng paggamit ng diskarteng Ward Leonard para sa kontrol ng bilis ng motor ng DC ay ang mga sumusunod:
- Sa parehong direksyon, maaaring makontrol ng isa ang bilis ng aparato sa isang maayos na pamamaraan para sa isang pinalawig na saklaw
- Ang pamamaraan na ito ay may kakayahang intrinsic na pagpepreno
- Ang nakakasunod na mga reaktibo na volt-amperes ay hindi nabalanse sa pamamagitan ng isang drive at ang malawak na nasasabik na magkasabay na motor na gumaganap bilang drive kaya magkakaroon ng isang pagtaas sa factor ng kuryente
- Kapag mayroong isang flashing load, ang drive motor ay ang induction motor pagkakaroon ng isang flywheel na ginagamit upang bawasan ang flashing load sa isang maliit na antas
Ang mga kawalan ng diskarteng Ward Leonard ay:
- Dahil ang pamamaraan na ito ay may isang hanay ng motor at generator, ang gastos ay higit pa
- Ang aparato ay kumplikado sa disenyo at may bigat din
- Kailangan ng mas maraming puwang para sa pag-install
- Nangangailangan ng regular na pagpapanatili at pundasyon ay hindi epektibo
- Magkakaroon ng malaking pagkalugi at kaya't ang kahusayan ng system ay nabawasan
- Mas maraming ingay ang nabuo
At ang aplikasyon ng pamamaraang Ward Leonard ay makinis na pagkontrol ng bilis sa motor na DC. Ang ilan sa mga halimbawa ay ang mga mine hoist, paper mills, lift, rolling mill, at crane.
Bukod sa dalawang diskarteng ito, ang pinakalawak na ginamit na pamamaraan ay ang bilis ng kontrol ng dc motor gamit ang PWM upang makamit ang bilis ng kontrol ng isang DC motor. Ang PWM ay nagsasangkot ng aplikasyon ng iba't ibang mga pulso ng lapad sa driver ng motor upang makontrol ang boltahe na inilapat sa motor. Ang pamamaraang ito ay nagpapatunay na napakahusay dahil ang pagkawala ng kuryente ay itinatago sa isang minimum, at hindi ito kasangkot sa paggamit ng anumang kumplikadong kagamitan.

Paraan ng Pagkontrol ng Boltahe
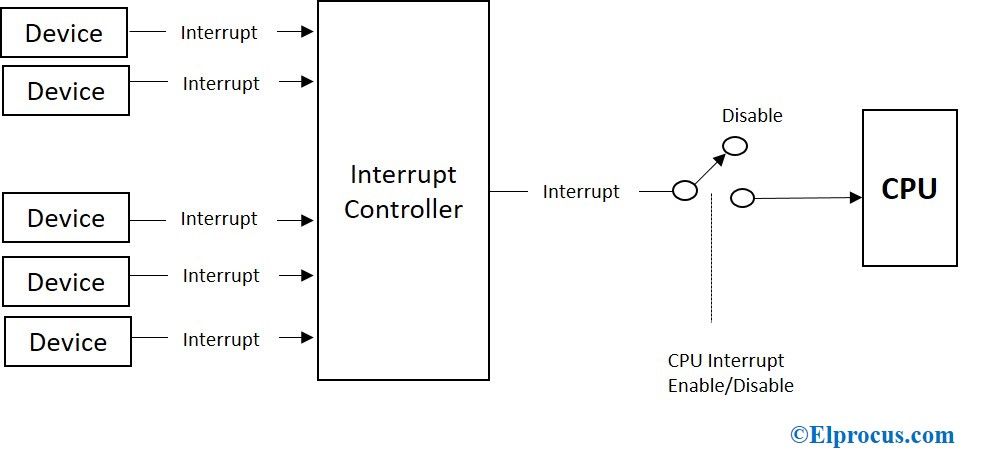
Ang diagram ng block sa itaas ay kumakatawan sa isang simple electric motor speed controller . Tulad ng itinatanghal sa diagram ng block sa itaas, ginagamit ang isang microcontroller upang pakainin ang mga signal ng PWM sa driver ng motor. Ang driver ng motor ay isang L293D IC na binubuo ng mga H-bridge circuit upang magmaneho ng motor.
Nakamit ang PWM sa pamamagitan ng pag-iiba ng mga pulso na inilapat upang paganahin ang pin ng driver ng motor na IC upang makontrol ang inilapat na boltahe ng motor. Ang pagkakaiba-iba ng mga pulso ay ginagawa ng microcontroller, na may input signal mula sa mga pushbuttons. Dito, ibinibigay ang dalawang mga pushbutton, bawat isa para sa pagbawas at pagdaragdag ng cycle ng tungkulin ng mga pulso.
Kaya, ang artikulong ito ay nagbigay ng isang detalyadong paliwanag ng iba't ibang mga diskarte ng DC motor control sa bilis at kung paano ang kontrol sa bilis ay pinakamahalagang sinusunod. Bukod dito inirerekumenda na malaman tungkol sa ang 12v dc motor speed controller .