Ang isang pick and place robot ay ang isa na ginagamit upang kunin ang isang bagay at ilagay ito sa nais na lokasyon. Maaari itong maging isang cylindrical robot na nagbibigay ng paggalaw sa pahalang, patayo at paikot na mga axe, isang spherical robot na nagbibigay ng dalawang paikot at isang linear na paggalaw, isang artikulong robot o isang scara robot (nakapirming mga robot na may 3 patayong axes rotary arm).
Mga kalamangan
Bago lumipat pa, tingnan natin ang ilang mga kadahilanan kung bakit ginustong mga robot ng pick at lugar:
- Mas mabilis ang mga ito at maaaring matapos ang trabaho sa ilang segundo kumpara sa kanilang mga katapat na tao.
- Ang mga ito ay nababaluktot at mayroong naaangkop na disenyo.
- Tama ang mga ito.
- Dinagdagan nila ang kaligtasan ng kapaligiran sa pagtatrabaho at talagang hindi napapagod.
Mga Bahagi ng isang Pumili N Lugar Robot

Piliin ang N Place Robot
Tingnan natin kung ano talaga ang binubuo ng pick and place na robot:
- Kay Rover : Ito ang pangunahing katawan ng robot na binubuo ng maraming mga matibay na katawan tulad ng isang silindro o isang globo, mga kasukasuan at mga link. Kilala rin ito bilang isang manipulator.
- End Effector : Ito ang katawan na konektado sa huling pinagsamang rover na ginagamit para sa layunin ng paghawak o paghawak ng mga bagay. Maaari itong maging isang pagkakatulad sa braso ng isang tao.
- Mga Actuator : Sila ang mga driver ng robot. Ito talaga ang gumagalaw ng robot. Maaari itong maging anumang motor tulad ng servo motor, stepper motor o niyumatik o haydroliko na mga silindro.
- Mga Sensor: Ginagamit ang mga ito upang maunawaan ang panloob pati na rin ang panlabas na estado upang matiyak na ang robot ay gumagana nang maayos bilang isang buo. Ang mga sensor ay nagsasangkot ng mga touch sensor, IR sensor atbp.
- Controller : Ginagamit ito upang makontrol ang mga actuator batay sa feedback ng sensor at sa gayon ay makontrol ang paggalaw ng bawat isa at bawat magkasanib at kalaunan ang paggalaw ng end effector.
Paggawa ng isang Pangunahing Pick N Place Robot:
Ang pangunahing pagpapaandar ng a pumili at ilagay ang robot ay ginagawa ng mga kasukasuan nito. Ang mga pagsasama ay magkatulad sa mga kasukasuan ng tao at ginagamit upang sumali sa dalawang magkakasunod na mahigpit na katawan sa robot. Maaari silang maging umiinog na magkasanib o linear na magkasanib. Upang magdagdag ng isang pinagsamang sa anumang link ng isang robot, kailangan nating malaman ang tungkol sa mga antas ng kalayaan at antas ng paggalaw para sa bahagi ng katawan na iyon. Ang mga antas ng kalayaan ay nagpapatupad ng guhit at paikot na paggalaw ng katawan at Mga degree ng paggalaw ay nagpapahiwatig ng bilang ng axis na maaaring ilipat ng katawan.

Isang Simpleng Pumili N Lugar ng Robot
Ang isang simpleng pick and place na robot ay binubuo ng dalawang matibay na katawan sa isang gumagalaw na base, na konektado kasama ng umiinog na magkasanib. Ang isang rotary joint ay isang nagbibigay ng pag-ikot sa 360 degree sa paligid ng alinman sa mga palakol.
- Ang ilalim o ang base ay naka-attach sa mga gulong na nagbibigay ng linear na paggalaw.
- Ang 1stang matibay na katawan ay naayos at sumusuporta sa pangalawang matibay na katawan kung saan ibinibigay ang end effector.
- Ang 2ndang matibay na katawan ay binibigyan ng paggalaw sa lahat ng 3 palakol at mayroong 3 degree na kalayaan. Ito ay konektado sa 1stkatawan na may isang umiikot na magkasanib.
- Ang end effector ay dapat tumanggap ng lahat ng 6 degree na kalayaan, upang maabot ang lahat ng panig ng bahagi, upang tumayo sa anumang taas.
Sa kabuuan, gumagana ang pangunahing pick and place robot tulad ng sumusunod:
- Ang mga gulong sa ilalim ng base ay tumutulong upang ilipat ang robot sa nais na lokasyon.
- Ang matibay na katawan na sumusuporta sa end effector ay yumuko o umayos upang maabot ang posisyon kung saan nakalagay ang bagay.
- Kinukuha ng end effector ang bagay na may isang malakas na mahigpit na pagkakahawak at inilalagay ito sa nais na posisyon.
Ngayon na mayroon kaming isang maikling ideya ng pick and place robot, ang pangunahing tanong ay kung paano talaga ito kontrolado.
Ang isang simpleng pick at lugar na robot ay maaaring makontrol sa pamamagitan ng pagkontrol sa paggalaw ng end effector nito. Ang paggalaw ay maaaring gumamit ng haydroliko na galaw, ibig sabihin, paggamit ng haydroliko na likido sa ilalim ng presyon upang himukin ang robot, o paggamit ng paggalaw ng niyumatik, ibig sabihin ang paggamit ng presyur na hangin upang maging sanhi ng paggalaw ng mekanikal. Gayunpaman ang pinakamabisang paraan ay ang paggamit ng mga motor upang maibigay ang kinakailangang paggalaw. Ang mga motor ay kailangang kontrolin upang makapagbigay ng kinakailangang paggalaw sa robot at sa end effector.
Paggawa ng Halimbawa ng Pagkontrol ng isang Pumili ng N Place Robot
Paano ang tungkol sa pagkontrol sa robot gamit ang ilang mga pindutan lamang sa keypad? Yes ito ay posible! Ang pagpindot lamang sa kinakailangang pindutan, maaari naming ipadala ang utos sa robot upang ilipat ito sa anumang direksyon upang makamit ang aming gawain. Bukod dito maaari itong makamit gamit ang simpleng wireless na komunikasyon.
Tingnan natin kung paano ito gumagana talaga:
Ang bahagi ng transmiter ay binubuo ng keypad na naka-interfaced sa microcontroller. Anumang numero ng pindutan sa decimal format ay na-convert sa 4 digit na binary ng microcontroller at ang parallel output sa isa sa port nito ay inilalapat sa encoder. Ino-convert ng encoder ang parallel data na ito sa serial data at ito ay pinakain sa transmiter, nilagyan ng isang antena upang maipadala ang serial data.

I-block ang Diagram na Nagpapakita ng Transmitter ng isang Pick N Place Robot
Ang panig ng tatanggap ay binubuo ng isang decoder na naka-interfaced sa microcontroller. Ang decoder ay nagko-convert ng natanggap na utos sa serial format sa parallel form at ibinibigay ang data na ito sa microcontroller. Batay sa utos na ito ang microcontroller ay nagpapadala ng naaangkop na mga signal ng pag-input sa mga driver ng motor upang himukin ang kani-kanilang mga motor.

I-block ang Diagram Ipinapakita ang Tatanggap ng isang Pumili ng N Place Robot
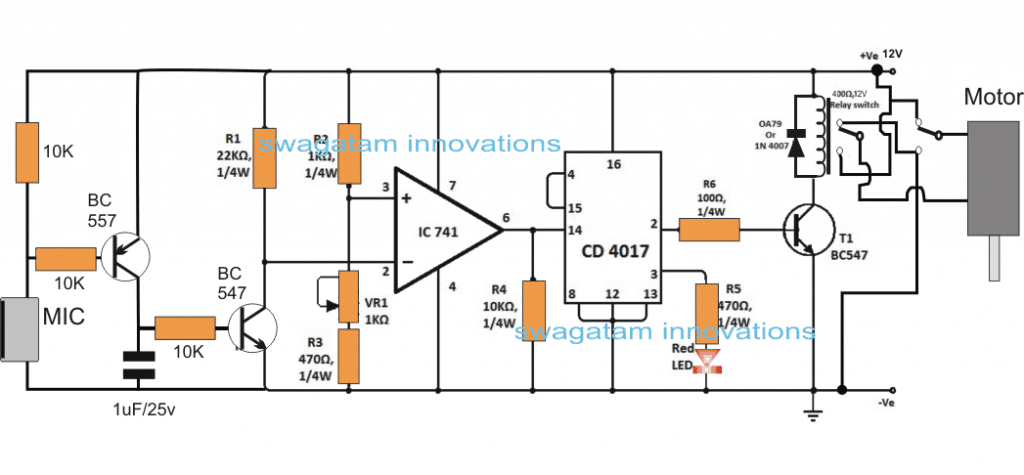
Ang system ay binubuo ng dalawang mga motor para sa pagbibigay ng paggalaw sa buong robot at dalawang iba pang mga motor upang maibigay ang paggalaw ng braso. Ang end effector o ang gripper ay kailangang kontrolin upang mailapat ang wastong presyon sa bagay upang mahawakan ito nang mabisa, upang bigyan ito ng malambot na kapit . Tinitiyak ito sa pamamagitan ng pagkontrol sa mga motor ng braso sa pamamagitan ng wastong utos. Ang output mula sa mga motor ng braso ay konektado sa isang risistor ng 10Ohms / 2W at sa oras ng motor na higit sa pag-load o naka-lock na kondisyon, isang mataas na boltahe ang nabuo sa buong risistor, na nagdudulot ng isang mataas na antas ng lohika sa output ng optoisolator at makagambala ang pin ng microcontroller na konektado sa output ng optoisolator sa pamamagitan ng isang pnp transistor ay nakakakuha ng mababang signal ng lohika, na pumipigil sa lahat ng iba pang mga operasyon ng gripper.
Sa gayon sa pamamagitan ng simpleng komunikasyon sa RF, talagang makokontrol natin ang isang pick and place na robot.
Mga Praktikal na Aplikasyon ng Pick and Place Robot:
- Mga Aplikasyon sa Depensa : Maaari itong magamit para sa pagsubaybay at upang pumili din ng mga mapanganib na bagay tulad ng bomba at ligtas itong isabog.
- Mga Aplikasyong Pang-industriya : Ang mga robot na ito ay ginagamit sa pagmamanupaktura, upang kunin ang mga kinakailangang bahagi at ilagay ito sa tamang posisyon upang makumpleto ang kagamitan sa makinarya. Maaari din itong magamit upang ilagay ang mga bagay sa conveyer belt pati na rin kunin ang mga sira na produkto mula sa conveyer belt.
- Mga Aplikasyong Medikal : Ang mga robot na ito ay maaaring magamit sa iba't ibang mga operasyon sa pag-opera tulad ng magkasanib na operasyon ng kapalit, operasyon ng orthopaedic at panloob na operasyon. Ginagawa nito ang mga pagpapatakbo nang may higit na katumpakan at kawastuhan.
Maliban sa mga application na ito, ang mga robot na ito ay maaari ding magamit sa iba`t ibang mga application na angkop sa sangkatauhan.
Ngayon ang tanong ay nananatili- Gaano kalayo ang araw kung kailan ang mga robot ay ganap na magpapagaan sa daan para sa mga tao?