Ipinapaliwanag ng post ang isang nai-program na bidirectional motor timer circuit para sa pagkontrol ng isang pasadyang mekanismong pang-industriya. Ang ideya ay hiniling ni G. Milton
Teknikal na mga detalye
Ako ay isang dalubhasa sa baso, medyo mahusay sa DIY atbp, ngunit hindi masyadong mainit sa electrics. Nagpaplano ako ng isang build para sa isang display box na 10mm Toughened Glass Watch, subalit nais ng aming kliyente na ito ay maging isang box ng winder ng relo.
Naitaguyod ko na nangangailangan kami ng 4 x 10rpm 24V AC Motors na tumakbo nang sabay-sabay. Kailangan nilang magsimulang lumiko bawat oras, sa loob ng 15-20 minuto.
Gayunpaman, kailangan nilang lumiko sa pakaliwa at pagkatapos ay laban sa pakaliwa oras sa oras. Mabuti kung maaari rin akong magkaroon ng isang manu-manong pagpipilian upang simulan at ihinto ang mga motor kapag nais ko.
Ito ba ay isang bagay na maaaring makatulong sa isang tao? Pakiusap
Salamat!
Milton
Ang disenyo
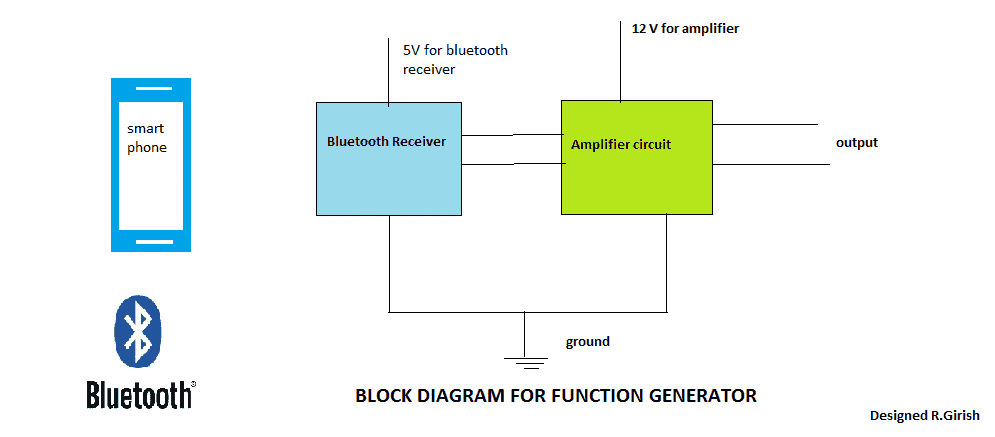
Ang ipinanukalang circuit ay maaaring maunawaan sa sumusunod na paglalarawan:
Ang yugto na binubuo ng dalawang 4060 ICs ay naka-configure bilang isang programmable yugto. Ang itaas na 4060 IC ay naka-wire bilang OFF timer circuit habang ang mas mababang IC ay nagpapasya sa ON oras ng circuit.
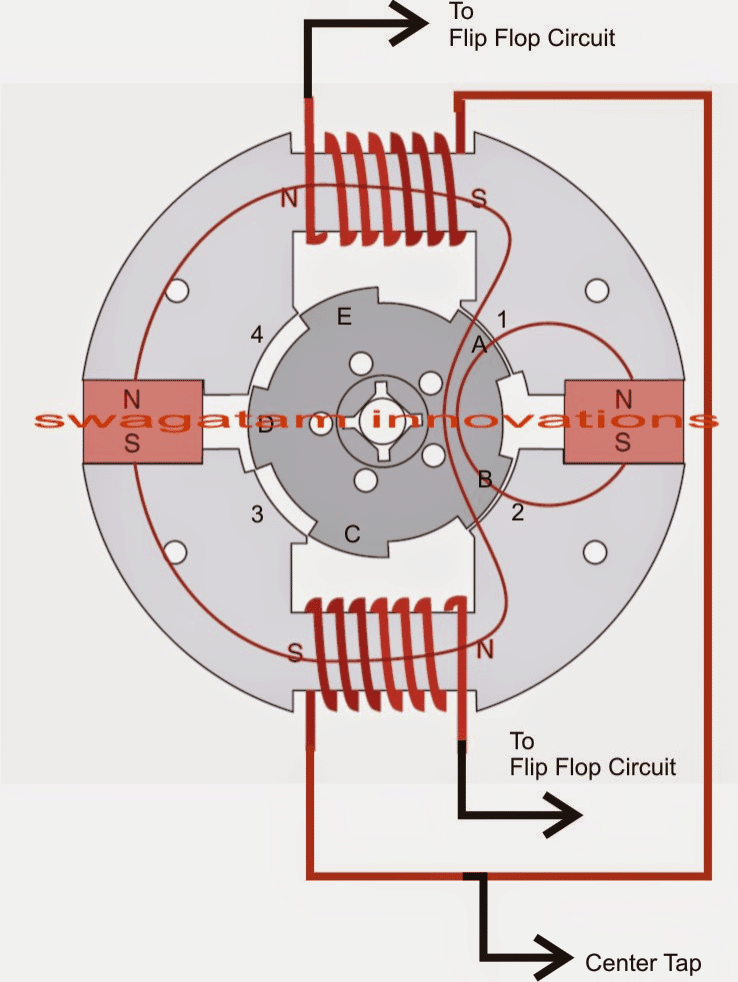
Ang seksyon sa kanang bahagi na binubuo ng IC 4017 ay bumubuo ng isang karaniwang flip flop circuit na nagpapalipat-lipat sa output nito mula 3 hanggang 2 at kabaligtaran bilang tugon sa bawat mataas na gatilyo sa pin # 14 na ito.
Kapag ang kapangyarihan ay nakabukas SA, ang itaas na 4060 ay nagsisimulang bilangin. Ang yugto na ito ay maaaring itakda para sa paggawa ng isang pagkaantala ng oras na 20 minuto ayon sa hiniling na mga detalye.
Sa parehong oras ang pin # 3 ng IC4017 ay gumagawa ng isang mataas na lohika dahil ito ang panimulang pin ng IC4017. Ang nakakonektang motor ay nagsisimula nang umiikot sa isang partikular na direksyon depende sa polarity nito sa mga relay.
Matapos ang itinakdang 20 minuto, lumipas ang oras, ang pin # 3 ng itaas na 4060 ay nagiging mataas na nagpapasimula sa mas mababang 4060.
Ang mataas mula sa 4060 ay naglalapat ng isang mataas na pag-trigger ng lohika sa pin14 ng IC4017 sa pamamagitan ng 0.22uF capacitor na pinipilit ang output nito upang lumukso mula sa pin3 hanggang pin2.
Ang relay sa pin2 / 7 yugto ng pagmamaneho ay pinapagana ngayon ang pagputol ng suplay ng motor at sa gayon ay pinahinto ang motor.
Matapos ang tungkol sa 1 oras na dapat ay ang tinukoy na agwat na itinakda sa mas mababang IC 4060, ang pin # 3 nito ay mataas at agad na i-reset ang itaas na IC4060 upang bumalik ito sa dating mode.
Sa proseso, pinapalitan din nito ang IC4017 upang ang output nito ay lumipat mula sa pin2 hanggang pin4, ang relay sa pin4 ay naibalik at ang motor ay nagsimulang umiikot ngunit ngayon sa kabaligtaran na direksyon.
Patuloy na umiikot ang motor hanggang sa susunod na 20 minuto pagkatapos na sa itaas ng pagkakasunud-sunod ng IC 4017 ay tumatalon sa pin7 at huminto muli ang motor.
Sa susunod na kasunod na pag-trigger mula sa mas mababang 4060 IC, ang system ay bumalik sa paunang sitwasyon at ang pag-ikot ay nagpapatuloy sa paulit-ulit na iminungkahi sa kahilingan.
Diagram ng Circuit

Nakaraan: Poultry Feed Controller Timer Circuit Susunod: PIC Tutorial- Mula sa Mga Rehistro sa Mga Nakagagambala