
Tulad ng iminungkahi ng pangalan, ang artikulong ito ay magbibigay ng isang tumpak na ideya tungkol sa istraktura at pagtatrabaho ng PID controller. Gayunpaman sa pagpunta sa mga detalye, kumuha kami ng isang pagpapakilala tungkol sa mga taga-kontrol ng PID. Ang mga taga-kontrol ng PID ay matatagpuan sa isang malawak na hanay ng mga aplikasyon para sa pang-industriya na kontrol sa proseso. Humigit-kumulang 95% ng mga operasyon ng closed-loop ng pang-industriya na awtomatiko Gumagamit ang sektor ng mga PID Controller. Ang PID ay nangangahulugang Proportional-Integral-Derivative. Ang tatlong mga tagakontrol na ito ay pinagsama sa isang paraan na gumagawa ito ng isang signal ng kontrol. Bilang isang tagakontrol ng feedback, naghahatid ito ng output ng kontrol sa nais na mga antas. Bago naimbento ang mga microprocessor, ang kontrol ng PID ay ipinatupad ng mga analog na elektronikong sangkap. Ngunit ngayon ang lahat ng mga tagakontrol ng PID ay naproseso ng mga microprocessor. Programmable na mga tagakontrol ng lohika mayroon ding inbuilt na mga tagubilin ng PID controller. Dahil sa kakayahang umangkop at pagiging maaasahan ng mga taga-kontrol ng PID, tradisyonal na ginagamit ito sa mga aplikasyon ng kontrol sa proseso.
Ano ang isang PID Controller?
Ang term na PID ay nangangahulugang proporsyonal na integral derivative at ito ay isang uri ng aparato na ginagamit upang makontrol ang iba't ibang mga variable ng proseso tulad ng presyon, daloy, temperatura, at bilis sa mga pang-industriya na aplikasyon. Sa controller na ito, ginagamit ang isang control loop feedback device upang makontrol ang lahat ng mga variable ng proseso.
Ang ganitong uri ng kontrol ay ginagamit upang himukin ang isang system sa direksyon ng isang layunin na lokasyon kung hindi man antas. Ito ay halos saanman para sa kontrol sa temperatura at ginagamit sa mga pang-agham na proseso, awtomatiko at napakaraming kemikal. Sa controller na ito, ginagamit ang closed-loop feedback upang mapanatili ang totoong output mula sa isang pamamaraan tulad ng malapit sa layunin kung hindi man output sa fixe point kung maaari. Sa artikulong ito, tinalakay ang disenyo ng PID controller na may mga control mode na ginagamit sa kanila tulad ng P, I & D.
Kasaysayan
Ang kasaysayan ng tagakontrol ng PID ay, Sa taong 1911, ang unang tagakontrol ng PID ay binuo ni Elmer Sperry. Pagkatapos nito, ang TIC (Taylor Instrumental Company) ay ipinatupad isang dating tagakontrol ng niyumatik na may ganap na maaayos sa taong1933. Matapos ang ilang taon, inalis ng mga control engineer ang error ng steady-state na matatagpuan sa loob ng proporsyonal na mga Controller sa pamamagitan ng pag-retune ng dulo sa ilang maling halaga hanggang sa ang error ay hindi zero.
Ang retuning na ito ay nagsama ng error na kung saan ay kilala bilang proportional-Integral na controller. Pagkatapos nito, sa taong 1940, ang unang pneumatic PID controller ay binuo sa pamamagitan ng isang derivative action upang mabawasan ang mga problema sa sobrang pag-overshooting.
Noong 1942, ipinakilala ni Ziegler at Nichols ang mga patakaran sa pag-tune upang matuklasan at maitakda ang mga naaangkop na parameter ng mga taga-kontrol ng PID ng mga inhinyero. Sa wakas, ang mga awtomatikong tagakontrol ng PID ay malawakan na ginamit sa mga industriya noong kalagitnaan ng 1950.
Diagram ng Block Controller ng PID
Ang isang closed-loop system tulad ng isang PID controller ay may kasamang system ng control control. Sinusuri ng system na ito ang variable ng feedback gamit ang isang nakapirming point upang makabuo ng isang signal ng error. Batay doon, binabago nito ang output ng system. Ang pamamaraan na ito ay magpapatuloy hanggang sa maabot ng error ang Zero kung hindi man ang halaga ng variable ng feedback ay magiging katumbas ng isang nakapirming point.
Nagbibigay ang controller na ito ng magagandang resulta kumpara sa uri ng ON / OFF na controller. Sa uri ng ON / OFF na controller, dalawang kundisyon lamang ang maaaring makuha upang pamahalaan ang system. Kapag ang halaga ng proseso ay mas mababa kaysa sa naayos na point, pagkatapos ito ay i-ON. Katulad nito, papatayin ito sa sandaling ang halaga ay mas mataas kaysa sa isang nakapirming halaga. Ang output ay hindi matatag sa ganitong uri ng controller at ito ay madalas na indayog sa rehiyon ng nakapirming punto. Gayunpaman, ang controller na ito ay mas matatag at tumpak kumpara sa ON / OFF na uri ng controller.

Paggawa ng PID controller
Paggawa ng PID Controller
Gamit ang paggamit ng isang mababang gastos na simpleng ON-OFF controller, dalawang estado ng kontrol lamang ang posible, tulad ng ganap na ON o ganap na OFF. Ginagamit ito para sa isang limitadong application ng kontrol kung saan ang dalawang estado ng kontrol na ito ay sapat na para sa layunin ng pagkontrol. Gayunpaman ang likas na katangian ng pag-oscillate na ito ay naglilimita sa paggamit nito at samakatuwid ito ay pinalitan ng mga taga-kontrol ng PID.
Pinapanatili ng PID controller ang output tulad ng mayroong zero error sa pagitan ng variable ng proseso at setpoint / nais na output ng mga operasyon ng closed-loop. Gumagamit ang PID ng tatlong pangunahing pag-uugali sa kontrol na ipinaliwanag sa ibaba.
P- Controller
Ang proporsyonal o P- controller ay nagbibigay ng isang output na proporsyonal sa kasalukuyang error e (t). Kinukumpara nito ang nais o itinakdang punto sa aktwal na halaga o halaga ng proseso ng feedback. Ang nagresultang error ay pinarami ng proporsyonal na pare-pareho upang makuha ang output. Kung ang halaga ng error ay zero, kung gayon ang output ng controller na ito ay zero.

P-Controller
Nangangailangan ang controller na ito ng biasing o manu-manong pag-reset kapag ginamit nang nag-iisa. Ito ay sapagkat hindi ito umabot sa kundisyon ng matatag na estado. Nagbibigay ito ng matatag na operasyon ngunit laging pinapanatili ang error na matatag. Ang bilis ng tugon ay nadagdagan kapag tumataas ang proporsyonal na pare-pareho na Kc.

Tugon ng P-Controller
I-Controller
Dahil sa limitasyon ng p-controller kung saan laging may isang offset sa pagitan ng variable ng proseso at setpoint, kinakailangan ang I-controller, na nagbibigay ng kinakailangang aksyon upang maalis ang error na matatag na estado. Isinasama nito ang error sa isang tagal ng panahon hanggang sa umabot sa zero ang halaga ng error. Hawak nito ang halaga sa huling aparato ng kontrol kung saan ang error ay magiging zero.

Controller ng PI
Bawasan ng integral na kontrol ang output nito kapag naganap ang isang negatibong error. Nililimitahan nito ang bilis ng tugon at nakakaapekto sa katatagan ng system. Ang bilis ng tugon ay nadagdagan ng pagbawas ng integral na nakuha, Ki.

Tugon ng Controller ng PI
Sa figure sa itaas, habang bumababa ang nakuha ng I-controller, ang error na steady-state ay patuloy din na bumababa. Para sa karamihan ng mga kaso, ang tagapagkontrol ng PI ay partikular na ginagamit kung saan hindi kinakailangan ang mataas na bilis na tugon.
Habang ginagamit ang PI controller, ang output ng I-controller ay limitado sa medyo saklaw upang mapagtagumpayan ang integral wind up mga kundisyon kung saan ang integral na output ay nagpapatuloy kahit na sa zero estado ng error, dahil sa mga hindi linya sa halaman.
D-Controller
Walang kakayahan ang I-controller na hulaan ang pag-uugali ng error sa hinaharap. Kaya normal itong reaksyon sa sandaling mabago ang setpoint. Tinatalo ng D-controller ang problemang ito sa pamamagitan ng pag-asa sa hinaharap na pag-uugali ng error. Ang output nito ay nakasalalay sa rate ng pagbabago ng error patungkol sa oras, pinarami ng pare-pareho ng derivative. Nagbibigay ito ng pagsisimula ng sipa para sa output sa gayon pagtaas ng tugon ng system.

Controller ng PID
Sa tugon sa itaas na figure ng D, ang controller ay higit pa, kumpara sa PI controller, at ang pag-aayos din ng oras ng output ay nabawasan. Pinapabuti nito ang katatagan ng system sa pamamagitan ng pagbabayad para sa phase lag na dulot ng I-controller. Ang pagtaas ng nakuha na nakukuha ay nagdaragdag ng bilis ng tugon.

Tugon ng Controller ng PID
Kaya't sa wakas ay naobserbahan namin na sa pamamagitan ng pagsasama-sama ng tatlong mga tagakontrol na ito, makukuha natin ang nais na tugon para sa system. Ang iba't ibang mga tagagawa ay nagdidisenyo ng iba't ibang mga PID algorithm.
Mga uri ng PID Controller
Ang mga taga-kontrol ng PID ay inuri sa tatlong uri tulad ng ON / OFF, proporsyonal, at karaniwang mga taga-kontrol sa uri. Ang mga controler na ito ay ginagamit batay sa control system, ang gumagamit ay maaaring magamit ang controller upang makontrol ang pamamaraan.
ON / OFF Control
Ang isang on-off na paraan ng kontrol ay ang pinakasimpleng uri ng aparato na ginagamit para sa pagkontrol sa temperatura. Ang output ng aparato ay maaaring maging ON / OFF sa pamamagitan ng walang estado ng estado. Bubuksan ng tagakontrol na ito ang output nang sabay-sabay na tumawid ang temperatura sa nakapirming punto. Ang isang limit controller ay isang partikular na uri ng ON / OFF controller na gumagamit ng isang latching relay. Ang relay na ito ay manu-manong na-reset at ginamit upang patayin ang isang pamamaraan sa sandaling ang isang tiyak na temperatura ay nakamit.
Proportional Control
Ang ganitong uri ng controller ay idinisenyo upang alisin ang pagbibisikleta na konektado sa pamamagitan ng kontrol na ON / OFF. Ang PID controller na ito ay magbabawas ng normal na lakas na ibinibigay patungo sa pampainit sa sandaling umabot ang temperatura sa nakapirming punto.
Ang tagakontrol na ito ay may isang tampok upang makontrol ang pampainit upang hindi ito lumagpas sa naayos na punto subalit maaabot nito ang nakapirming point upang mapanatili ang isang matatag na temperatura.
Ang proporsyonal na kilos na ito ay maaaring makamit sa pamamagitan ng paglipat ng ON & OFF ng output para sa maliit na tagal ng panahon. Ang proporsyon ng oras na ito ay magbabago ng ratio mula sa ON time hanggang OFF na oras para sa pagkontrol sa temperatura.
Karaniwang Type Controller ng PID
Ang ganitong uri ng PID controller ay pagsasanibin ang proporsyonal na kontrol sa pamamagitan ng integral at derivative control upang awtomatikong tulungan ang yunit upang mabayaran ang mga pagbabago sa loob ng system. Ang mga pagbabago, integral at derivative na ito ay ipinahayag sa mga yunit na nakabatay sa oras.
Ang mga kinokontrol na ito ay isinangguni din sa pamamagitan ng kanilang mga katumbasan, RATE & RESET na magkakasunod. Ang mga tuntunin ng PID ay dapat na ayusin nang magkahiwalay kung hindi man ay nai-tune sa isang tukoy na system na may pagsubok pati na rin error. Ang mga tagakontrol na ito ay mag-aalok ng pinaka-tumpak at matatag na kontrol ng 3 uri ng controller.
Mga Controller ng PID na Real-Time
Sa kasalukuyan, mayroong iba't ibang mga uri ng mga PID Controller na magagamit sa merkado. Ang mga controler na ito ay ginagamit para sa mga kinakailangan sa pagkontrol sa industriya tulad ng presyon, temperatura, antas, at daloy. Kapag ang mga parameter na ito ay kinokontrol sa pamamagitan ng PID, binubuo ng mga pagpipilian ang paggamit ng isang hiwalay na PID controller o alinman sa PLC.
Ang mga magkakahiwalay na tagakontrol na ito ay ginagamit kahit saan ang dalawang mga loop ay kinakailangan upang suriin pati na rin kontrolado kung hindi man sa mga kondisyon saan man ito ay kumplikado sa kanan ng pagpasok sa pamamagitan ng mas malaking mga system.
Nagbibigay ang mga control device na ito ng iba't ibang mga pagpipilian para sa solo at kambal na kontrol sa loop. Ang mga nakapag-iisang uri ng mga kontrolado ng PID ay nagbibigay ng maraming mga configure na naayos na point upang makagawa ng autonomous na maraming mga alarma.
Ang mga independyenteng tagakontrol na ito ay pangunahing naglalaman ng mga taga-kontrol ng PID mula sa Honeywell, mga taga-kontrol ng temperatura mula sa Yokogawa, mga tagakontrol ng autotune mula sa OMEGA, Siemens, at mga kumokontrol sa ABB.
Ginagamit ang mga PLC tulad ng mga taga-kontrol ng PID sa karamihan ng mga aplikasyon ng pang-industriya na kontrol Ang pag-aayos ng mga bloke ng PID ay maaaring gawin sa loob ng mga PAC o PLC upang magbigay ng mga nakahihigit na pagpipilian para sa isang eksaktong kontrol ng PLC. Ang mga kumokontrol na ito ay mas matalino at malakas din kumpara sa magkakahiwalay na mga kontrol. Ang bawat PLC ay nagsasama ng PID block sa loob ng software ng software.
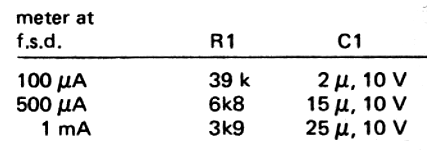
Mga Paraan ng Pag-tune
Bago maganap ang pagtatrabaho ng PID controller, dapat itong iakma upang umangkop sa dinamika ng proseso upang makontrol. Ibinibigay ng mga taga-disenyo ang mga default na halaga para sa mga term ng P, I, at D, at ang mga halagang ito ay hindi maibigay ang nais na pagganap at kung minsan ay humantong sa kawalang-tatag at mabagal na pagganap ng kontrol. Ang iba`t ibang mga uri ng mga pamamaraan ng pag-tune ay binuo upang maiayos ang mga taga-kontrol ng PID at nangangailangan ng labis na pansin mula sa operator upang piliin ang pinakamahusay na mga halaga ng proporsyonal, integral, at derivative na mga natamo. Ang ilan sa mga ito ay ibinibigay sa ibaba.
Ginagamit ang mga Controller ng PID sa karamihan ng mga aplikasyon sa industriya ngunit dapat malaman ng isa ang mga setting ng controller na ito upang ayusin ito nang tama upang makabuo ng ginustong output. Dito, ang pag-tune ay walang iba kundi ang pamamaraan ng pagtanggap ng isang perpektong tugon mula sa tagapamahala sa pamamagitan ng pagtatakda ng pinakamahusay na proporsyonal na mga nadagdag, integral at derivative factor.
Ang nais na output ng PID controller ay maaaring makuha sa pamamagitan ng pag-tune ng controller. Mayroong iba't ibang mga diskarteng magagamit upang makuha ang kinakailangang output mula sa controller tulad ng trial & error, Zeigler-Nichols at proseso ng curve ng reaksyon. Ang mga pinaka-madalas na ginagamit na pamamaraan ay trial & error, Zeigler-Nichols, atbp.
Paraan ng Pagsubok at Error: Ito ay isang simpleng pamamaraan ng pag-tune ng PID controller. Habang ang system o controller ay gumagana, maaari naming ibagay ang controller. Sa pamamaraang ito, una, kailangan nating itakda ang mga halaga ng Ki at Kd sa zero at dagdagan ang proporsyonal na term (Kp) hanggang sa maabot ng system ang pag-uugali ng oscillating. Kapag naka-oscillate na ito, ayusin ang Ki (Integral term) upang ang mga oscillation ay tumigil at sa wakas ayusin ang D upang makakuha ng mabilis na tugon.
Diskarte sa Curve ng Reaksyon ng Proseso: Ito ay isang open-loop na pamamaraan ng pag-tune. Gumagawa ito ng isang tugon kapag ang isang hakbang na input ay inilapat sa system. Sa una, kailangan naming mag-apply ng ilang control output sa system nang manu-mano at kailangang itala ang curve ng tugon.
Pagkatapos nito, kailangan nating kalkulahin ang slope, dead time, ang pagtaas ng oras ng curve, at sa wakas ay papalitan ang mga halagang ito sa mga equation na P, I, at D upang makuha ang mga halagang nakuha ng mga term ng PID.

Kurba ng reaksyon ng proseso
Pamamaraan ng Zeigler-Nichols: Nagmungkahi si Zeigler-Nichols ng mga paraan ng closed-loop para sa pag-tune ng PID controller. Iyon ang patuloy na pamamaraang pagbibisikleta at pamamasa ng oscillation na pamamaraan. Ang mga pamamaraan para sa parehong pamamaraan ay pareho ngunit ang pag-uugali ng oscillation ay magkakaiba. Sa ito, una, kailangan nating itakda ang pare-pareho ng p-controller, Kp sa isang partikular na halaga habang ang mga halaga ng Ki at Kd ay zero. Ang proporsyonal na pakinabang ay nadagdagan hanggang sa ang sistema ay nag-oscillate sa isang pare-pareho na amplitude.
Ang makukuha kung saan ang system ay gumagawa ng pare-pareho na mga oscillation ay tinatawag na ultimate gain (Ku) at ang panahon ng mga oscillations ay tinatawag na ultimate period (Pc). Kapag naabot na, maaari naming ipasok ang mga halaga ng P, I, at D sa PID controller ng Zeigler-Nichols table na nakasalalay sa ginamit na controller tulad ng P, PI o PID, tulad ng ipinakita sa ibaba.

Zeigler-Nichols table
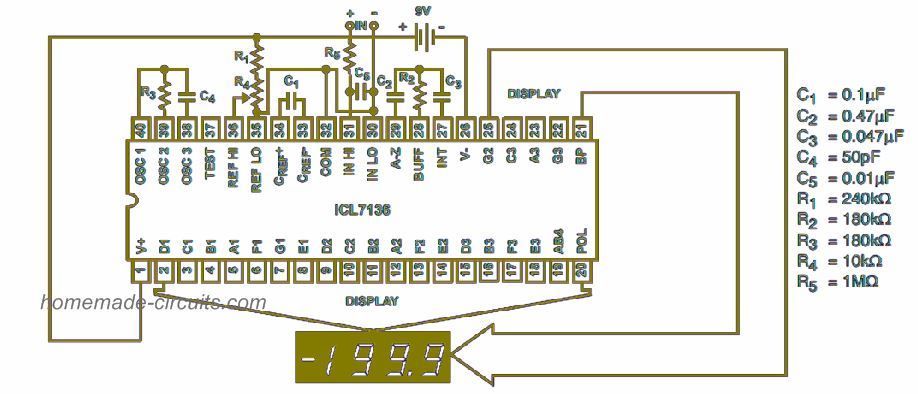
Istraktura ng PID Controller
Ang taga-kontrol ng PID ay binubuo ng tatlong mga termino, katulad ng proporsyonal, integral, at derivative control. Ang pinagsamang pagpapatakbo ng tatlong mga tagakontrol na ito ay nagbibigay ng isang diskarte sa kontrol para sa kontrol ng proseso. Ginagawa ng PID controller ang mga variable ng proseso tulad ng presyon, bilis, temperatura, daloy, atbp. Ang ilan sa mga aplikasyon ay gumagamit ng mga PID Controller sa mga network ng cascade kung saan ginagamit ang dalawa o higit pang PID upang makamit ang kontrol.

Istraktura ng PID Controller
Ipinapakita ng figure sa itaas ang istraktura ng PID controller. Binubuo ito ng isang PID block na nagbibigay ng output nito sa block ng proseso. Ang proseso / halaman ay binubuo ng pangwakas na mga aparato ng kontrol tulad ng mga actuator, control valve, at iba pang mga control device upang makontrol ang iba't ibang mga proseso ng industriya / halaman.
Ang isang signal ng feedback mula sa planta ng proseso ay ihinahambing sa isang itinakdang punto o sangguniang signal u (t) at ang kaukulang error signal e (t) ay pinakain sa PID algorithm. Ayon sa proporsyonal, integral, at hinalaw na pagkalkula ng pagkontrol sa algorithm, gumagawa ang tagakontrol ng isang pinagsamang tugon o kontroladong output na inilalapat sa mga aparato ng pagkontrol ng halaman.
Ang lahat ng mga application ng kontrol ay hindi kailangan ng lahat ng tatlong mga elemento ng kontrol. Ang mga kumbinasyon tulad ng mga kontrol ng PI at PD ay madalas na ginagamit sa mga praktikal na aplikasyon.
Mga Aplikasyon
Kasama sa mga application ng PID controller ang sumusunod.
Ang pinakamahusay na application ng PID controller ay ang kontrol sa temperatura kung saan gumagamit ang controller ng isang input ng isang sensor ng temperatura at ang output nito ay maaaring kakampi sa isang elemento ng kontrol tulad ng isang fan o heater. Pangkalahatan, ang tagakontrol na ito ay isang elemento lamang sa isang sistema ng pagkontrol sa temperatura. Ang buong sistema ay dapat suriin pati na rin isinasaalang-alang habang pinipili ang tamang controller.
Pagkontrol sa Temperatura ng Pugon
Pangkalahatan, ang mga hurno ay ginagamit upang isama ang pagpainit pati na rin ang nagtataglay ng isang malaking halaga ng hilaw na materyal sa malaking temperatura. Karaniwan para sa materyal na sinasakop upang magsama ng isang malaking masa. Dahil dito, tumatagal ng isang mataas na dami ng pagkawalang-kilos at ang temperatura ng materyal ay hindi mabilis na nagbabago kahit na inilapat ang malaking init. Ang tampok na ito ay nagreresulta sa isang katamtamang matatag na signal ng PV at pinahihintulutan ang Derivative period na mahusay na iwasto para sa kasalanan nang walang matinding pagbabago sa FCE o sa CO.
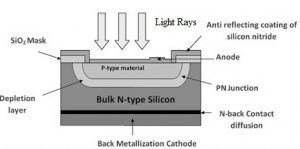
MPPT Charge Controller
Ang katangiang V-I ng isang photovoltaic cell ay higit sa lahat nakasalalay sa saklaw ng temperatura pati na rin ang irradiance. Batay sa mga kondisyon ng panahon, ang kasalukuyang at operating boltahe ay patuloy na magbabago. Kaya, napakahalaga nito upang subaybayan ang pinakamataas na PowerPoint ng isang mahusay na photovoltaic system. Ang Controller ng PID ay ginagamit upang maghanap ng MPPT sa pamamagitan ng pagbibigay ng nakapirming boltahe at kasalukuyang mga puntos sa taga-kontrol ng PID. Kapag ang kondisyon ng panahon ay nabago pagkatapos ay mapanatili ng tracker ang kasalukuyang at boltahe na matatag.
Ang Converter ng Power Electronics
Alam namin na ang converter ay isang application ng electronics na kuryente, kaya ang isang PID controller ay kadalasang ginagamit sa mga converter. Kailan man ang isang converter ay kaalyado sa pamamagitan ng isang system batay sa pagbabago sa loob ng pag-load, pagkatapos ay mababago ang output ng converter. Halimbawa, ang isang inverter ay kaalyado ng pagkarga ng malaking kasalukuyang ibinibigay sa sandaling nadagdagan ang pag-load. Kaya, ang parameter ng boltahe pati na rin ang kasalukuyang ay hindi matatag, ngunit magbabago ito batay sa kinakailangan.
Sa estadong ito, bubuo ang tagakontrol na ito ng mga signal ng PWM upang buhayin ang mga IGBT ng inverter. Batay sa pagbabago sa loob ng pag-load, ang signal ng tugon ay ibinigay sa PID controller upang makagawa ito ng n error. Ang mga signal na ito ay nabuo batay sa signal ng kasalanan. Sa ganitong estado, makakakuha tayo ng nababago na input at output sa pamamagitan ng isang katulad na inverter.
Paglalapat ng PID Controller: Closed Loop Control para sa isang Brushless DC motor
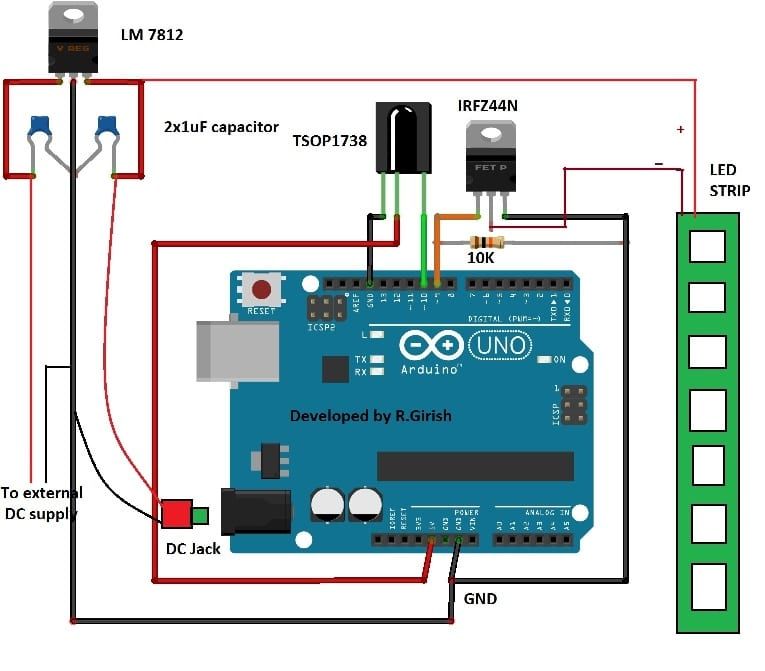
PID Controller Interfacing
Ang disenyo at interfacing ng PID controller ay maaaring gawin gamit ang Arduino microcontroller. Sa laboratoryo, ang Arduino based PID controller ay dinisenyo gamit ang Arduino UNO board, mga elektronikong sangkap, thermoelectric cooler, samantalang ang mga wika ng software ng software na ginagamit sa sistemang ito ay C o C ++. Ang sistemang ito ay ginagamit upang makontrol ang temperatura sa loob ng laboratoryo.
Ang mga parameter ng PID para sa isang tukoy na controller ay matatagpuan sa pisikal. Ang pagpapaandar ng iba't ibang mga parameter ng PID ay maaaring ipatupad sa pamamagitan ng kasunod na kaibahan sa pagitan ng iba't ibang mga anyo ng mga Controller.
Ang interfacing system na ito ay maaaring mahusay na kalkulahin ang temperatura sa pamamagitan ng isang error na ± 0.6 ℃ samantalang ang isang pare-pareho na temperatura ay kumokontrol sa pamamagitan lamang ng isang maliit na pagkakaiba mula sa ginustong halaga na nakamit. Ang mga konseptong ginamit sa sistemang ito ay magbibigay ng mura pati na rin ang eksaktong mga diskarte upang pamahalaan ang mga pisikal na parameter sa isang ginustong saklaw sa loob ng laboratoryo.
Kaya, tinatalakay ng artikulong ito ang isang pangkalahatang ideya ng PID controller na may kasamang kasaysayan, block diagram, istraktura, uri, pagtatrabaho, mga pamamaraan sa pag-tune, interfacing, pakinabang, at aplikasyon. Inaasahan namin na makapagbigay kami ng pangunahing ngunit tumpak na kaalaman tungkol sa mga taga-kontrol ng PID. Narito ang isang simpleng tanong para sa inyong lahat. Sa gitna ng iba't ibang mga pamamaraan ng pag-tune, aling pamamaraan ang mas mainam na ginagamit upang makamit ang isang pinakamabuting kalagayan na pagtatrabaho ng PID controller at bakit?
Hiniling ka na mabait na ibigay ang iyong mga sagot sa seksyon ng komento sa ibaba.
Mga Kredito sa Larawan
Diagram ng block ng PID controller ni wikimedia
Ang istraktura ng PID controller, P-controller, P - tugon ng controller at PID controller ng blog.opticontrols
P - tugon ng controller ng kinokontrol. nais.umich
Tugon ng PI- controller ng m. kumain
Ang tugon ng PID Controller ni wikimedia
Zeigler-Nichols table ni kinokontrol. nais








{kind=link}
{kind=link}
{kind=link}
{kind=link}