
Ang isang stepper motor ay isang electromekanical na aparato na pinapalitan nito ang lakas na elektrikal sa lakas na mekanikal. Gayundin, ito ay isang walang brush, magkasabay na de-kuryenteng motor na maaaring hatiin ang isang buong pag-ikot sa isang malawak na bilang ng mga hakbang. Ang posisyon ng motor ay maaaring kontrolin nang tumpak nang walang anumang mekanismo ng feedback, basta ang motor ay maingat na sukat sa aplikasyon. Ang mga stepper motor ay katulad ng paglipat ayaw ng motor. Gumagamit ang stepper motor ng teorya ng pagpapatakbo para sa mga magnet upang gawin ang motor shaft na iikot ang isang tumpak na distansya kapag ibinigay ang isang pulso ng kuryente. Ang stator ay may walong poste, at ang rotor ay may anim na poste. Mangangailangan ang rotor ng 24 na pulso ng kuryente upang ilipat ang 24 na hakbang upang makagawa ng isang kumpletong rebolusyon. Ang isa pang paraan upang sabihin ito ay ang rotor ay lilipat ng tiyak na 15 ° para sa bawat pulso ng kuryente na natanggap ng motor.
Prinsipyo sa Konstruksiyon at Paggawa
Ang pagtatayo ng isang stepper motor ay may kaugnayan sa a DC motor . Nagsasama ito ng isang permanenteng pang-akit tulad ng Rotor na nasa gitna at babalik ito sa sandaling puwersa ang kumilos dito. Ang rotor na ito ay nakapaloob sa pamamagitan ng isang hindi. ng stator na kung saan ay sugat sa pamamagitan ng isang magnetic coil sa buong ito. Ang stator ay nakaayos malapit sa rotor upang ang mga magnetic field sa loob ng mga stators ay maaaring makontrol ang paggalaw ng rotor.

Stepper Motor
Ang stepper motor ay maaaring kontrolin ng energizing bawat stator nang paisa-isa. Kaya't ang stator ay magpapakuryente at gagana tulad ng isang electromagnetic poste na gumagamit ng nakakasuklam na enerhiya sa rotor upang sumulong. Ang alternatibong magnetizing ng stator pati na rin ang demagnetizing ay magpapalipat-lipat sa rotor at pinapayagan itong lumipat sa mahusay na kontrol.
Ang prinsipyo ng pagtatrabaho ng stepper motor ay Electro-Magnetism. Nagsasama ito ng isang rotor na kung saan ay ginawa ng isang permanenteng pang-akit samantalang ang isang stator ay may electromagnets. Sa sandaling maibigay ang supply sa paikot-ikot ng stator pagkatapos ay bubuo ang magnetic field sa loob ng stator. Ngayon ang rotor sa motor ay magsisimulang ilipat sa umiikot na magnetic field ng stator. Kaya't ito ang pangunahing prinsipyo ng pagtatrabaho ng motor na ito.

Paggawa ng Stepper Motor
Sa motor na ito, mayroong isang malambot na bakal na nakapaloob sa pamamagitan ng electromagnetic stators. Ang mga poste ng stator pati na rin ang rotor ay hindi nakasalalay sa uri ng stepper. Kapag ang mga stators ng motor na ito ay napasigla pagkatapos ang rotor ay paikutin upang i-line up ang sarili nito sa stator kung hindi man ay magiging pinakamaliit na agwat sa pamamagitan ng stator. Sa ganitong paraan, ang mga stators ay pinapagana sa isang serye upang paikutin ang stepper motor.
Mga Diskarte sa Pagmamaneho
Diskarteng nagmamaneho ng stepper motor s ay maaaring posible sa ilang mga espesyal na circuit dahil sa kanilang kumplikadong disenyo. Mayroong maraming mga paraan upang himukin ang motor na ito, ang ilan sa mga ito ay tinalakay sa ibaba sa pamamagitan ng pagkuha ng isang halimbawa ng isang apat na yugto na stepper motor.
Single Mode ng Pagkaganyak
Ang pangunahing pamamaraan ng pagmamaneho ng isang stepper motor ay isang solong mode ng paggulo. Ito ay isang lumang pamamaraan at hindi gaanong ginagamit sa kasalukuyan ngunit kailangang malaman ang tungkol sa diskarteng ito. Sa pamamaraang ito ang bawat yugto kung hindi man ang stator na katabi ng bawat isa ay mai-trigger nang paisa-isa na kahalili sa isang espesyal na circuit. Ito ay magpapakilala at mag-demagnetize ng stator upang ilipat ang rotor pasulong.
Buong Hakbang na Pagmamaneho
Sa diskarteng ito, ang dalawang mga stators ay pinapagana sa isang oras sa halip na isa sa isang mas kaunting tagal ng panahon. Ang pamamaraan na ito ay nagreresulta sa mataas na metalikang kuwintas at pinapayagan ang motor na magmaneho ng mataas na karga.
Half Step Drive
Ang pamamaraan na ito ay medyo nauugnay sa Full step drive dahil ang dalawang stators ay isasaayos sa tabi ng bawat isa upang maisaaktibo muna ito habang ang pangatlong isa ay maaaktibo pagkatapos nito. Ang ganitong uri ng pag-ikot para sa paglipat muna ng dalawang mga stators at pagkatapos ng pangatlong stator na iyon ay magdadala ng motor. Ang diskarteng ito ay magreresulta sa pinabuting paglutas ng stepper motor habang binabawasan ang metalikang kuwintas.
Micro Stepping
Ang pamamaraang ito ay madalas na ginagamit dahil sa kawastuhan nito. Ang variable na kasalukuyang hakbang ay ibibigay ng stepper motor driver circuit patungo sa mga coiler ng stator sa loob ng anyo ng isang sinusoidal waveform. Ang kawastuhan ng bawat hakbang ay maaaring mapahusay ng maliit na kasalukuyang hakbang na ito. Malawakang ginagamit ang diskarteng ito sapagkat nagbibigay ito ng mataas na kawastuhan pati na rin nababawasan ang ingay sa pagpapatakbo sa isang malaking lawak.
Stepper Motor Circuit at Ang Operasyon Nito
Iba't iba ang pagpapatakbo ng mga stepper motor mula sa DC brush motor , na umiikot kapag ang boltahe ay inilapat sa kanilang mga terminal. Ang mga stepper motor, sa kabilang banda, ay mabisang mayroong maraming mga ngipin na electromagnet na nakaayos sa paligid ng isang gitnang piraso ng galamang piraso ng bakal. Ang mga electromagnet ay pinalakas ng isang panlabas na control circuit, halimbawa, isang microcontroller.

Stepper Motor Circuit
Upang maikot ang shaft ng motor, ang unang isang electromagnet ay binibigyan ng lakas, na ginagawang magnetikong naaakit sa ngipin ng electromagnet ang mga ngipin ng gear. Sa puntong ang mga ngipin ng gear ay gaanong nakahanay sa unang electromagnet, sila ay bahagyang napapalitan mula sa susunod na electromagnet. Kaya't kapag ang susunod na electromagnet ay naka-ON at ang una ay naka-OFF, ang gear ay umiikot nang bahagya upang makahanay sa susunod at mula doon ay inuulit ang proseso. Ang bawat isa sa mga bahagyang pag-ikot na ito ay tinatawag na isang hakbang, na may isang integer na bilang ng mga hakbang na gumagawa ng isang buong pag-ikot.
Sa ganoong paraan, ang motor ay maaaring buksan ng isang tumpak. Ang Stepper motor ay hindi patuloy na umiikot, paikutin nila sa mga hakbang. Mayroong 4 na coil na may 90oanggulo sa pagitan ng bawat isa na naayos sa stator. Ang mga koneksyon ng stepper motor ay natutukoy ng paraan ng pagkakabit ng mga coil. Sa isang stepper motor, ang mga coil ay hindi konektado. Ang motor ay mayroong 90ohakbang ng pag-ikot kasama ang mga coil na pinalakas sa isang cyclic order, na tinutukoy ang direksyon ng pag-ikot ng baras.
Ang pagtatrabaho ng motor na ito ay ipinapakita sa pamamagitan ng pagpapatakbo ng switch. Ang mga coil ay naaktibo sa serye sa mga 1-sec na agwat. Ang baras ay umiikot ng 90osa bawat oras na ang susunod na likaw ay naaktibo. Ang mababang bilis ng metalikang kuwintas na ito ay direktang mag-iiba sa kasalukuyang.
Mga uri ng Stepper Motor
Mayroong tatlong pangunahing uri ng mga stepper motor, ang mga ito ay:
- Permanenteng stepper ng magnet
- Hybrid kasabay na stepper
- Variable na pag-aatubal na stepper
Permanenteng Magnet Stepper Motor
Ang mga permanenteng magnet na pang-magnet ay gumagamit ng isang permanenteng magnet (PM) sa rotor at gumana sa atraksyon o pagtulak sa pagitan ng rotor PM at ng stator electromagnets.
Ito ang pinakakaraniwang uri ng stepper motor kumpara sa iba't ibang uri ng stepper motor na magagamit sa merkado. Ang motor na ito ay may kasamang permanenteng mga magnet sa pagbuo ng motor. Ang ganitong uri ng motor ay kilala rin bilang tin-can / can-stack motor. Ang pangunahing pakinabang ng stepper motor na ito ay mas mababa ang gastos sa pagmamanupaktura. Para sa bawat rebolusyon, mayroon itong 48-24 na mga hakbang.
Variable Reluctance Stepper Motor
Ang mga motor na variable na pag-aatubili (VR) ay may isang simpleng iron rotor at nagpapatakbo batay sa prinsipyo na ang minimum na pag-aatubili ay nangyayari na may minimum na puwang, samakatuwid ang mga puntos ng rotor ay naaakit patungo sa mga poste ng magnet ng stator.
Ang stepper motor tulad ng variable na pag-aatubili ay ang pangunahing uri ng motor at ginagamit ito sa nakaraang maraming taon. Tulad ng ipinahihiwatig ng pangalan, ang posisyon ng angotor ng rotor pangunahin ay nakasalalay sa pag-aatubili ng magnetic circuit na maaaring mabuo sa mga ngipin ng stator pati na rin isang rotor.
Hybrid Synchronous Stepper Motor
Ang mga hybrid stepper motor ay pinangalanan dahil gumagamit sila ng isang kumbinasyon ng permanenteng magnet (PM) at variable na diskarte sa pag-aatubili (VR) upang makamit ang maximum na lakas sa maliliit na laki ng package.
Ang pinakatanyag na uri ng motor ay ang hybrid stepper motor sapagkat nagbibigay ito ng isang mahusay na pagganap kumpara sa isang permanenteng rotor ng magnet sa mga tuntunin ng bilis, paglutas ng hakbang, at paghawak ng metalikang kuwintas. Ngunit, ang ganitong uri ng stepper motor ay mahal kumpara sa permanenteng magnet stepper motor. Pinagsasama ng motor na ito ang mga tampok ng parehong permanenteng pang-akit at variable na pag-aatubili na mga stepper motor. Ginagamit ang mga motor na ito kung saan kinakailangan ang mas kaunting hakbang sa paghakbang tulad ng 1.5, 1.8 & 2.5 degree.
Paano Pumili ng isang Stepper Motor?
Bago pumili ng isang stepper motor para sa iyong kinakailangan, napakahalagang suriin ang kurba ng bilis ng bilis ng motor. Kaya ang impormasyong ito ay magagamit mula sa taga-disenyo ng motor, at ito ay isang graphic na simbolo ng metalikang kuwintas ng motor sa isang tinukoy na bilis. Ang curve na bilis ng tulin ng motor ay dapat na tumutugma sa mga kinakailangan ng aplikasyon o kung hindi man, ang inaasahang pagganap ng system ay hindi maaaring makuha.
Mga uri ng Kable
Ang mga stepper motor ay karaniwang dalawang-phase na motor tulad ng unipolar kung hindi man bipolar. Para sa bawat yugto sa isang unipolar motor, mayroong dalawang paikot-ikot. Dito, ang gitnang-tapped ay isang karaniwang lead sa pagitan ng dalawang paikot-ikot patungo sa isang poste. Ang unipolar motor ay may 5 hanggang 8 lead.
Sa konstruksyon, kung saan ang karaniwan ng dalawang poste ay nahahati subalit naka-tap sa gitna, ang stepper motor na ito ay may kasamang anim na lead. Kung ang dalawang-poste na taps center ay maikli sa loob, kung gayon ang motor na ito ay may kasamang limang lead. Ang unipolar na may 8 lead ay magpapadali sa parehong serye at parallel na koneksyon habang ang motor na may limang tingga o anim na tingga ay may koneksyon sa serye ng stator coil. Ang pagpapatakbo ng unipolar motor ay maaaring gawing simple sapagkat habang pinapatakbo ang mga ito, walang kinakailangan na baligtarin ang daloy ng kasalukuyang nasa loob ng circuit ng pagmamaneho na kilala bilang mga bifilar motor.
Sa isang bipolar stepper motor, para sa bawat poste, mayroong isang solong paikot-ikot. Ang direksyon ng supply ay kailangang baguhin sa pamamagitan ng circuit ng pagmamaneho upang ito ay maging kumplikado kaya't ang mga motor na ito ay tinatawag na hindi magkatulad na mga motor.
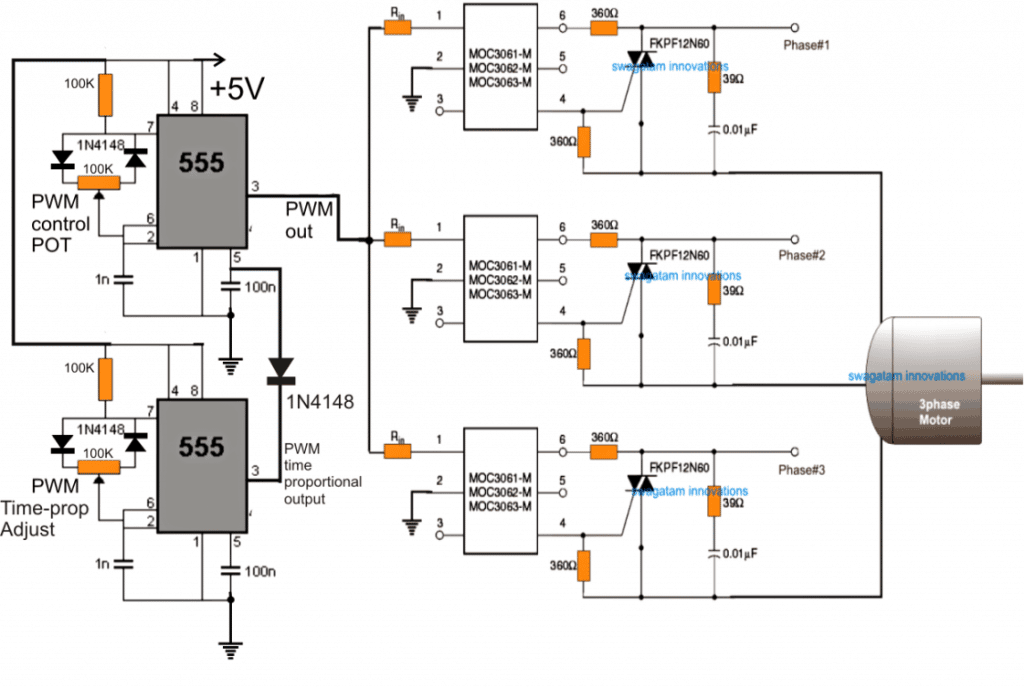
Pagkontrol ng Stepper Motor ng Varying Clock Pulses
Pagkontrol ng stepper motor ang circuit ay isang simple at murang gastos na circuit, pangunahin na ginagamit sa mababang mga aplikasyon ng kuryente. Ang circuit ay ipinapakita sa figure, na binubuo ng 555 timers IC bilang isang matatag na multi-vibrator. Ang dalas ay kinakalkula sa pamamagitan ng paggamit ng ibinigay na ugnayan.
Dalas = 1 / T = 1.45 / (RA + 2RB) C Kung saan ang RA = RB = R2 = R3 = 4.7 kilo-ohm at C = C2 = 100 µF.

Pagkontrol ng Stepper Motor ng Varying Clock Pulses
Ang output ng timer ay ginagamit bilang isang orasan para sa dalawang 7474 dual 'D' flip-flop (U4 at U3) na naka-configure bilang isang ring counter. Kapag ang kapangyarihan ay paunang nakabukas, ang unang flip-flop lamang ang itinakda (ie Q output sa pin 5 ng U3 ay magiging sa lohika '1') at ang iba pang tatlong flip-flop ay na-reset (ibig sabihin ang output ng Q ay nasa lohika 0). Sa pagtanggap ng isang pulso ng orasan, ang lohikal na '1' output ng unang flip-flop ay inililipat sa pangalawang flip-flop (pin 9 ng U3).
Kaya, ang output ng lohika 1 ay patuloy na nagbabago ng paikot sa bawat pulso ng orasan. Ang Q outputs ng lahat ng apat na flip-flop ay pinalakas ng Darling-ton transistor arrays sa loob ng ULN2003 (U2) at konektado sa stepper motor na paikot-ikot na kahel, kayumanggi, dilaw, itim hanggang 16, 15,14, 13 ng ULN2003 at ang pula sa + ng supply.
Ang karaniwang punto ng paikot-ikot ay konektado sa supply ng + 12V DC, na konektado din sa pin 9 ng ULN2003. Ang kulay ng code na ginamit para sa mga paikot-ikot ay maaaring magkakaiba mula sa gawin. Kapag ang kapangyarihan ay nakabukas, ang control signal na konektado sa SET pin ng unang flip-flop at CLR pin ng iba pang tatlong flip-flop ay naging aktibo 'mababa' (dahil sa power-on-reset circuit na nabuo ng R1 -C1 na kumbinasyon) upang itakda ang unang flip-flop at i-reset ang natitirang tatlong flip-flop.
Sa pag-reset, ang Q1 ng IC3 ay 'mataas' habang ang lahat ng iba pang mga output ng Q ay 'mababa'. Ang isang panlabas na pag-reset ay maaaring buhayin sa pamamagitan ng pagpindot sa switch ng pag-reset. Sa pamamagitan ng pagpindot sa reset switch, maaari mong ihinto ang stepper motor. Ang motor ay muling nagsimulang umiikot sa parehong direksyon sa pamamagitan ng paglabas ng switch na reset.
Pagkakaiba sa pagitan ng Stepper Motor at Servo Motor
Ang mga motor ng servo ay angkop para sa mataas na metalikang kuwintas at mga application ng bilis samantalang ang stepper motor ay mas mura kaya ginagamit sila kung saan ang mataas na hawakan ng metalikang kuwintas, pagpabilis ng may mababang-sa-daluyan, ang bukas kung hindi man ay naisara ang operasyon ng sarado na loop. Ang pagkakaiba sa pagitan ng stepper motor at servo motor ay may kasamang mga sumusunod.
| Stepper Motor | Servo motor |
| Ang motor na gumagalaw sa discrete na mga hakbang ay kilala bilang stepper motor. | Ang isang servo motor ay isang uri ng closed-loop motor na konektado sa isang encoder upang magbigay ng mabilis na feedback at posisyon.
|
| Ginamit ang stepper motor kung saan ang kontrol, pati na rin ang katumpakan, ay pangunahing mga prayoridad | Ginamit ang servo motor kung saan ang bilis ang pangunahing priyoridad
|
| Ang pangkalahatang bilang ng poste ng stepper motor ay mula 50 hanggang 100 | Ang pangkalahatang bilang ng poste ng servo motor ay mula 4to 12 |
| Sa isang closed-loop system, ang mga motor na ito ay gumagalaw na may pare-parehong pulso | Ang mga motor na ito ay nangangailangan ng isang encoder upang mabago ang mga pulso upang makontrol ang posisyon.
|
| Ang Torque ay mataas sa mas mabilis na bilis | Ang torque ay mababa sa mataas na bilis |
| Ang oras ng pagpoposisyon ay mas mabilis sa buong maikling stroke | Ang oras ng pagpoposisyon ay mas mabilis sa buong mahabang stroke |
| Kilusan ng mataas na pagpapaubaya ng pagkawalang-kilos | Kilusan ng mababang pagpapaubaya ng pagkawalang-galaw |
| Ang motor na ito ay angkop para sa mababang mekanismo ng tigas tulad ng kalo at sinturon | Hindi angkop para sa mekanismo na hindi gaanong tigas |
| Mataas ang kakayahang tumugon | Ang pagtugon ay mababa |
| Ginagamit ang mga ito para sa pabagu-bago ng mga karga | Ang mga ito ay hindi ginagamit para sa pabagu-bago ng mga karga |
| Hindi kinakailangan ang pagsasaayos ng pakinabang / pag-tune | Kinakailangan ang pagsasaayos ng pakinabang / pag-tune |
Stepper Motor vs DC Motor
Ang parehong mga stepper at dc motor ay ginagamit sa iba't ibang mga pang-industriya na aplikasyon ngunit ang mga pangunahing pagkakaiba sa pagitan ng dalawang motor na ito ay medyo nakalilito. Dito, naglilista kami ng ilang mga karaniwang katangian sa pagitan ng dalawang disenyo na ito. Ang bawat katangian ay tinalakay sa ibaba.
Mga Katangian | Stepper Motor | DC Motor |
| Mga Katangian sa Pagkontrol | Simple at gumagamit ng microcontroller | Simple at walang kinakailangang mga extra |
| Saklaw ng Bilis | Mababa mula 200 hanggang 2000 RPMs | Katamtaman |
| Pagiging maaasahan | Mataas | Katamtaman |
| Kahusayan | Mababa | Mataas |
| Torque o Bilis ng Mga Katangian | Pinakamataas na Torque sa Mas kaunting Mga Kilos | Mataas na Torque sa Mas kaunting Mga Kilos |
| Gastos | Mababa | Mababa |
Mga Parameter ng Stepper Motor
Pangunahing isinasama ng mga parameter ng stepper motor ang anggulo ng hakbang, mga hakbang para sa bawat rebolusyon, mga hakbang para sa bawat segundo, at RPM.
Hakbang Angle
Ang anggulo ng hakbang ng stepper motor ay maaaring tukuyin bilang angulo kung saan ang rotor ng motor ay lumiliko sa sandaling ang isang solong pulso ay ibinigay sa input ng stator. Ang resolusyon ng motor ay maaaring tinukoy bilang ang bilang ng mga hakbang ng motor at ang bilang ng mga rebolusyon ng rotor.
Resolusyon = Bilang ng Mga Hakbang / Bilang ng Rebolusyon ng Rotor
Ang pag-aayos ng motor ay maaaring magpasya sa pamamagitan ng hakbang-anggulo at ito ay ipinahayag sa loob ng mga degree. Ang resolusyon ng isang motor (ang hakbang na numero) ay ang no. ng mga hakbang na ginagawa sa loob ng iisang rebolusyon ng rotor. Kapag ang hakbang-anggulo ng motor ay maliit pagkatapos ang resolusyon ay mataas para sa pag-aayos ng motor na ito.
Ang kawastuhan ng mga pag-aayos ng mga bagay sa pamamagitan ng motor na ito ay higit sa lahat nakasalalay sa resolusyon. Kapag ang resolusyon ay mataas pagkatapos ang katumpakan ay magiging mababa.
Ang ilang mga katumpakan na motor ay maaaring lumikha ng 1000 mga hakbang sa loob ng isang solong rebolusyon kabilang ang 0.36 degree na step-anggulo. Ang isang tipikal na motor ay may kasamang 1.8 degree na anggulo ng hakbang na may 200 mga hakbang para sa bawat rebolusyon. Ang magkakaibang mga anggulo ng hakbang tulad ng 15 degree, 45 degree, at 90 degree ay napaka-pangkaraniwan sa normal na mga motor. Ang bilang ng mga anggulo ay maaaring magbago mula dalawa hanggang anim at ang isang maliit na anggulo ng hakbang ay maaaring makamit sa pamamagitan ng mga slotted na bahagi ng poste.
Mga Hakbang para sa Bawat Rebolusyon
Ang mga hakbang para sa bawat resolusyon ay maaaring tukuyin bilang bilang ng mga anggulo ng hakbang na kinakailangan para sa isang kabuuang rebolusyon. Ang formula para dito ay 360 ° / Hakbang Angle.
Mga Hakbang para sa bawat Segundo
Ang ganitong uri ng parameter ay pangunahing ginagamit para sa pagsukat ng bilang ng mga hakbang na sakop sa loob ng bawat segundo.
Rebolusyon bawat Minuto
Ang RPM ay ang rebolusyon bawat minuto. Ginagamit ito upang sukatin ang dalas ng rebolusyon. Kaya sa pamamagitan ng paggamit ng parameter na ito, makakalkula namin ang bilang ng mga rebolusyon sa isang solong minuto. Ang pangunahing ugnayan sa pagitan ng mga parameter ng stepper motor ay tulad ng sumusunod.
Mga Hakbang para sa Bawat Segundo = Rebolusyon bawat Minuto x Mga Hakbang bawat Himagsikan / 60
Ang Stepper Motor Interfacing na may 8051 Microcontroller
Ang stepper motor na nakikipag-interfaces sa 8051 ay napaka-simple sa pamamagitan ng paggamit ng tatlong mga mode tulad ng wave drive, full step drive & half step drive sa pamamagitan ng pagbibigay ng 0 & 1 sa apat na wires ng motor batay sa kung aling drive mode ang dapat nating piliin para sa pagpapatakbo ng motor na ito.
Ang natitirang dalawang wires ay dapat na isama sa isang supply ng boltahe. Dito ginagamit ang unipolar stepper motor kung saan ang apat na dulo ng mga coil ay konektado sa pangunahing apat na pin ng port-2 sa microcontroller gamit ang ULN2003A.
Ang microcontroller na ito ay hindi nagbibigay ng sapat na kasalukuyang upang himukin ang mga coil kaya't ang kasalukuyang driver ng IC ay gusto ng ULN2003A. Dapat gamitin ang ULN2003A at ito ang koleksyon ng 7- pares ng NPN Darlington transistors. Ang pagdidisenyo ng pares ng Darlington ay maaaring gawin sa pamamagitan ng dalawang bipolar transistors na konektado para sa pagkamit ng maximum na kasalukuyang amplification.
Sa ULN2003A driver IC, ang mga input pin ay 7, ang mga output pin ay 7, kung saan ang dalawang mga pin ay para sa power supply & Ground terminal. Dito ginagamit ang mga 4-input at 4-output na pin. Bilang kahalili sa ULN2003A, ginagamit din ang L293D IC para sa pagpapalaki ng kasalukuyang.
Kailangan mong obserbahan ang dalawang karaniwang mga wire at apat na mga wire ng coil nang maingat o kung hindi man ay hindi lumiliko ang stepper motor. Maaari itong sundin sa pamamagitan ng pagsukat ng paglaban sa pamamagitan ng isang multimeter ngunit ang multimeter ay hindi magpapakita ng anumang mga pagbasa sa pagitan ng dalawang mga phase ng mga wire. Kapag ang karaniwang kawad at iba pang dalawang mga wire ay nasa pantay na yugto pagkatapos ay dapat itong magpakita ng isang katulad na paglaban samantalang ang dalawang mga coil finish point sa katulad na yugto ay magpapakita ng dobleng paglaban kumpara sa paglaban sa mga karaniwang punto pati na rin ang isang endpoint.
Pag-troubleshoot
- Ang pag-troubleshoot ay ang proseso upang suriin ang katayuan ng motor kung gumagana ang motor o hindi. Ginagamit ang sumusunod na checklist upang i-troubleshoot ang stepper motor.
- Una, i-verify ang mga koneksyon pati na rin ang code ng circuit.
- Kung ito ay ok, susunod na i-verify na ang motor ay nakakakuha ng wastong supply ng boltahe o kung hindi ay nag-vibrate lamang ito subalit hindi umiikot.
- Kung ang supply ng boltahe ay maayos, pagkatapos ay i-verify ang mga endpoint ng apat na likid na kaalyado sa ULN2003A IC.
- Una, tuklasin ang dalawang pangkalahatang mga endpoint at ayusin ang mga ito sa 12v supply, pagkatapos nito ayusin ang natitirang apat na mga wire sa IC ULN2003A. Hanggang sa magsimula ang stepper motor, subukan ang lahat ng posibleng mga kombinasyon. Kung ang koneksyon ng mga ito ay hindi wasto pagkatapos motor na ito ay mag-vibrate sa lugar ng umiikot.
Maaari bang Patuloy na Patakbuhin ng Stepper Motors?
Pangkalahatan, lahat ng mga motor ay tumatakbo o paikutin nang tuluy-tuloy ngunit ang karamihan sa mga motor ay hindi maaaring tumigil habang sila ay nasa ilalim ng lakas, Kapag sinubukan mong paghigpitan ang baras ng isang motor kapag ito ay nasa ilalim ng suplay ng kuryente pagkatapos nito masunog o masisira.
Bilang kahalili, ang mga stepper motor ay dinisenyo upang makagawa ng isang discrete na hakbang, pagkatapos maghintay ka ulit doon na hakbang at manatili doon. Kung nais naming gawin ang motor na manatili sa isang solong lokasyon para sa mas kaunting oras bago humakbang muli pagkatapos ito ay magiging hitsura ng patuloy na pag-ikot. Ang pagkonsumo ng kuryente ng mga motor na ito ay mataas ngunit ang pagwawaldas ng kuryente pangunahin na nangyayari sa sandaling ang motor ay tumigil o hindi maganda ang disenyo, pagkatapos ay mayroong isang pagkakataon para sa sobrang pag-init. Dahil sa kadahilanang ito, ang kasalukuyang suplay ng motor ay madalas na nabawasan sa sandaling ang motor ay nasa isang posisyon ng paghawak para sa isang mas mahabang oras.
Ang pangunahing dahilan ay, kapag umiikot ang motor, ang input na bahagi ng kuryenteng kuryente ay maaaring mabago sa lakas na mekanikal. Kapag ang motor ay tumigil habang umiikot ito, ang lahat ng lakas ng pag-input ay maaaring mabago sa init sa loob ng likid.
Mga kalamangan
Ang bentahe ng stepper motor isama ang sumusunod.
- Ang tigas
- Simpleng konstruksyon
- Maaaring gumana sa isang open-loop control system
- Mababa ang pagpapanatili
- Gumagana ito sa anumang sitwasyon
- Mataas ang pagiging maaasahan
- Ang anggulo ng pag-ikot ng motor ay proporsyonal sa input pulse.
- Ang motor ay may buong metalikang kuwintas sa paghinto.
- Ang tumpak na pagpoposisyon at kakayahang ulitin ng paggalaw dahil ang mahusay na mga stepper motor ay may katumpakan na 3 - 5% ng isang hakbang at ang error na ito ay hindi nakatipon mula sa isang hakbang hanggang sa susunod.
- Mahusay na tugon sa pagsisimula, pagtigil, at pag-reverse.
- Tunay na maaasahan dahil walang mga contact brushes sa motor. Samakatuwid ang buhay ng motor ay nakasalalay lamang sa buhay ng tindig.
- Ang tugon ng motor sa mga digital input pulses ay nagbibigay ng open-loop control, na ginagawang mas simple at hindi gaanong magastos ang motor.
- Posible upang makamit ang napakababang bilis ng magkasabay na pag-ikot na may isang pagkarga na direktang isinama sa baras.
- Ang isang malawak na hanay ng mga bilis ng pag-ikot ay maaaring mapagtanto habang ang bilis ay proporsyonal sa dalas ng mga input na pulso.
Mga Dehado
Ang kawalan ng stepper motor isama ang sumusunod.
- Mabisa ang kahusayan
- Ang Torque ng isang motor ay tatanggi nang mabilis sa bilis
- Mababa ang kawastuhan
- Hindi ginagamit ang puna para sa pagtukoy ng mga potensyal na napalampas na hakbang
- Maliit na Torque patungo sa Inertia Ratio
- Labis na Ingay
- Kung ang motor ay hindi kontrolado nang maayos pagkatapos maaaring maganap ang mga resonance
- Ang pagpapatakbo ng motor na ito ay hindi madali sa napakataas na bilis.
- Kailangan ang nakalaang control circuit
- Kung ihahambing sa mga DC motor, gumagamit ito ng mas maraming kasalukuyang
Mga Aplikasyon
Ang mga application ng stepper motor isama ang sumusunod.
- Mga Makinang Pang-industriya - Ang mga motor na Stepper ay ginagamit sa mga pansukat ng awto at kagamitan sa machine na awtomatikong kagamitan sa produksyon.
- Seguridad - mga bagong produkto ng pagsubaybay para sa industriya ng seguridad.
- Medikal - Ang mga stepper motor ay ginagamit sa loob ng mga medikal na scanner, sampler, at matatagpuan din sa loob ng digital dental photography, mga fluid pump, respirator, at makinarya ng pagsusuri sa dugo.
- Consumer Electronics - Stepper Motors sa camera para sa awtomatikong digital camera focus at zoom function.
At mayroon ding mga application ng machine machine, mga aplikasyon ng computer peripheral.
Kaya, ito ay tungkol sa lahat isang pangkalahatang ideya ng stepper motor tulad ng konstruksyon, prinsipyo ng pagtatrabaho, pagkakaiba, pakinabang, kawalan, at mga aplikasyon nito. Ngayon mayroon kang isang ideya tungkol sa mga uri ng sobrang motor at kanilang mga aplikasyon kung mayroon kang anumang mga query sa paksang ito o sa elektrikal at mga elektronikong proyekto iwanan ang mga komento sa ibaba.
Pagkikilala sa kumuha ng larawan
- Stepper Motor ni MST







{kind=link}