Sa post na ito matututunan natin ang tungkol sa stepper motor. Susisiyasatin namin kung ano ang stepper motor, ang pangunahing mekanismo ng pagtatrabaho, mga uri ng stepper motor, stepping mode, at panghuli ang mga pakinabang at disadvantages nito.
Ano ang stepper motor?
Ang stepper motor ay walang motor na walang motor ang umiikot na baras (rotor) ay nakumpleto ang isang pag-ikot na may tinukoy na bilang ng mga hakbang. Dahil sa stepped na katangian ng pag-ikot nakakakuha ito ng pangalan bilang stepper motor.

Nagbibigay ang stepper motor tumpak na kontrol sa pag-ikot ng anggulo at bilis. Ito ay isang disenyo ng open-loop, na nangangahulugang walang mekanismo ng feedback ang ipinatupad para sa pagsubaybay sa pag-ikot.
Maaari nitong baguhin ang bilis nito, palitan ang direksyon ng umiikot at i-lock sa isang posisyon kaagad. Ang bilang ng mga hakbang ay natutukoy ng bilang ng mga ngipin na naroroon sa rotor. Halimbawa: kung ang isang stepper motor ay binubuo ng 200 ngipin pagkatapos,
360 (degree) / 200 (walang ngipin) = 1.8 degree
Kaya, ang bawat hakbang ay magiging 1.8 degree. Ang mga stepper motor ay kinokontrol ng mga microcontroller at driver circuit. Malawakang ginagamit ito sa mga laser printer, 3D printer, optical drive, robot atbp.
Pangunahing mekanismo ng pagtatrabaho:
Ang isang stepper motor ay maaaring binubuo ng maraming bilang ng mga poste na may sugat na tanso na tanso na tinatawag na stator o hindi gumagalaw na bahagi ng motor. Ang gumagalaw na bahagi ng motor ay tinawag bilang rotor, na binubuo ng maraming bilang ng mga ngipin.

Kapag ang isang poste ay pinalakas, ang pinakamalapit na ngipin ay makakasama sa energized poste na iyon at ang iba pang ngipin sa rotor ay bahagyang mapapalitan o hindi naayon sa iba pang mga hindi pinalakas na poste.
Ang susunod na poste ay magpapalakas ng lakas at ang mga nakaraang poste ay mawawalan ng lakas, ngayon ang mga hindi nakahanay na mga poste ay makakasama sa kasalukuyang may lakas na poste, gumawa ito ng isang solong hakbang.
Ang susunod na poste ay napasigla at ang dating poste ay nawalan ng lakas, gumawa ito ng isa pang hakbang at ang siklo na ito ay nagpatuloy ng maraming beses upang makagawa ng isang buong pag-ikot.
Narito ang isa pang napakasimpleng halimbawa kung paano gumana ang stepper motor:

Pangkalahatan ang mga ngipin ng rotor ay mga magnet na nakaayos sa alternating hilaga at South Pole fashion. Tulad ng pagtulak ng mga poste at hindi tulad ng akit ng poste, ngayon ang paikot-ikot na poste na ‘A’ ay pinagsigla at ipinapalagay na enerhiyang poste bilang Hilagang Pole at rotor bilang South Pole, nakakaakit ito ng timog na poste ng rotor patungo sa poste ng ‘A’ tulad ng ipinakita sa imahe.
Ngayon ang poste ng A ay de-energized at ang poste na 'B' ay pinalakas, ngayon ang timog na poste ng rotor ay makahanay sa poste na 'B'. Ang mga katulad na poste na 'C' at poste na 'D' ay magpapasigla at magpapawalang lakas sa parehong paraan upang makumpleto ang isang pag-ikot.
Sa ngayon maunawaan mo kung paano ang isang mekanismo ng pagtatrabaho ng stepper motor.
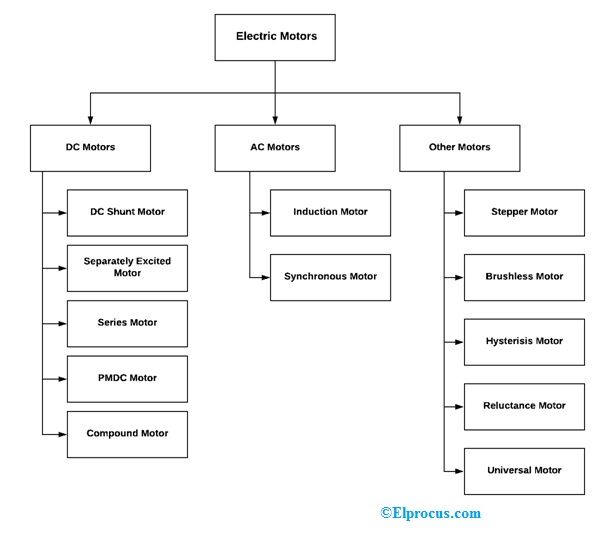
Mga uri ng stepper motor:
Mayroong tatlong uri ng stepper motor:
• Permanenteng stepper ng magnet
• Variable na atubili na stepper
• Hybrid kasabay na stepper
Permanenteng stepper ng Magnet:
Ang mga permanenteng magnet stepper motor ay gumagamit ng permanenteng mga ngipin na pang-magnet sa rotor na nakaayos sa alternating poste ng poste (North-South-North-South ……), nagbibigay ito ng mas malaking metalikang kuwintas.
Variable na atubili na stepper:
Ang variable na nag-aatubiling stepper ay gumagamit ng malambot na materyal na bakal bilang rotor na may maraming bilang ng mga ngipin at nagpapatakbo batay sa prinsipyo na ang minimum na pag-aatubili na mangyari sa minimum na puwang, na nangangahulugang ang pinakamalapit na ngipin ng rotor ay naaakit patungo sa poste kapag ito ay pinalakas, tulad ng isang metal na nakakaakit patungo sa isang magnet.
Hybrid kasabay na stepper:
Sa hybrid stepper motor kapwa ang nabanggit na pamamaraan sa itaas ay pinagsama upang makakuha ng maximum na metalikang kuwintas. Ito ang pinakakaraniwang uri ng stepper motor at mahal din na pamamaraan.
Mga stepping mode:
Mayroong 3 uri ng mga stepping mode
• Buong stepping mode
• Half-stepping mode
• Micro stepping mode
Buong stepping mode:
Sa buong hakbang na mode ay maaaring maunawaan ng sumusunod na halimbawa: kung ang isang stepper motor ay may 200 ngipin pagkatapos, ang isang buong hakbang ay 1.8 degree (na ibinibigay sa simula ng artikulo) hindi ito iikot mas mababa o higit sa 1.8 degree.
Ang buong hakbang ay karagdagang naiuri sa dalawang uri:
• Single phase mode
• Dalawang phase mode
Sa parehong mode ng yugto, ang rotor ay tumatagal ng isang buong hakbang, ang pangunahing pagkakaiba sa pagitan ng dalawang ito ay, ang solong mode ay nagbibigay ng mas kaunting metalikang kuwintas at ang dalawang yugto ng mode ay nagbibigay ng mas maraming metalikang kuwintas.
• Single Phase mode:
Sa solong phase mode isang yugto lamang (isang pangkat ng paikot-ikot / poste) ang pinalakas sa isang naibigay na oras, ito ang pinakamaliit na paraan ng pag-ubos ng enerhiya ngunit nagbibigay din ito ng mas kaunting metalikang kuwintas.
• Dalawang mode na Phase:
Sa dalawang yugto mode, dalawang yugto (dalawang pangkat ng paikot-ikot / poste) ay pinalakas sa isang naibigay na oras na gumagawa ito ng mas maraming metalikang kuwintas (30% hanggang 40%) ang solong phase mode.
Half stepping mode:
Tapos na ang half stepping mode para sa doble na resolusyon ng motor. Sa kalahating hakbang tulad ng iminungkahi ng pangalan na tumatagal ng kalahati ng isang buong hakbang, sa halip na buong 1.8 degree, kalahating hakbang ay tumatagal ng 0.9 degree.
Ang kalahating hakbang ay nakakamit sa pamamagitan ng pagbabago ng solong phase mode at dobleng phase mode na kahalili. Binabawasan nito ang stress sa mga piyesa ng makina at nadagdagan ang kinis sa pag-ikot. Ang kalahating hakbang ay binabawasan ang metalikang kuwintas ng humigit-kumulang 15%. Ngunit ang metalikang kuwintas ay maaaring dagdagan sa pamamagitan ng pagtaas ng kasalukuyang inilapat sa motor.
Micro stepping:
Tapos ang micro stepping para sa pinakamadulas na pag-ikot. Ang isang buong hakbang ay nahahati hanggang sa 256 na mga hakbang. Para sa micro stepping kailangan nito ng espesyal na microstep controller. Ang metalikang kuwintas nito ay nababawas ng halos 30%.
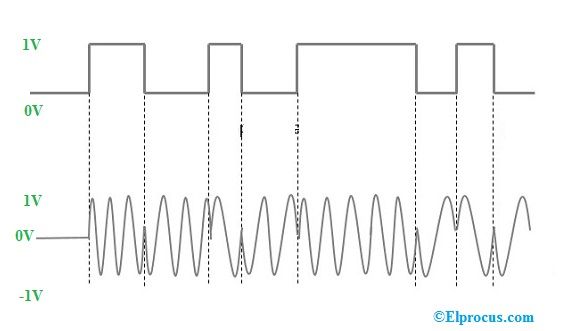
Kailangang mag-input ang mga driver ng sinusoidal wave para sa fluid rotation. Nagbibigay ang mga driver ng dalawang sinusoidal input na may 90 degree phase out.
Nagbibigay ito ng pinakamahusay na kontrol sa pag-ikot at binabawasan ang stress ng mekanikal nang malaki at binabawasan ang ingay sa pagpapatakbo.
Ang mga pangunahing bentahe at kawalan ng stepper motor ay maaaring malaman sa mga sumusunod na puntos:
Mga kalamangan:
• Pinakamahusay na kontrol sa angular na pag-ikot.
• Mataas na metalikang kuwintas sa mabagal na bilis.
• Instant na pagbabago sa paikot na direksyon.
• Minimal na konstruksyon sa makina.
Mga disadvantages:
• Ang lakas ay natupok kahit na sa panahon ng walang pag-ikot na ginagawa ito para sa pag-lock ng rotor sa nakapirming posisyon.
• Walang mekanismo ng feedback ang naroroon upang maitama laban sa mga error sa pag-ikot at upang subaybayan ang kasalukuyang posisyon.
• Kailangan nito ng kumplikadong circuit ng driver.
• Ang metalikang kuwintas ay nabawasan sa mas mataas na bilis.
• Hindi madaling makontrol ang motor sa mas mataas na bilis.
Nakaraan: Mga Pinakadakilang Mito tungkol sa LED Lighting Susunod: Kinakalkula ang Capacitor Charge / Discharge Time gamit ang RC Constant