Sa post na ito tatalakayin namin ang mga pangunahing kaalaman sa pagpupulong ng katawan ng quadcopter gamit ang mga tubo at bolt ng aluminyo, sa mga susunod na seksyon ng artikulo tatalakayin din namin ang tungkol sa isang simpleng drone circuit na maaaring magamit para sa paglipad ng isang maliit na pagpupulong ng drone nang hindi nakasalalay sa mga kumplikadong microcontrollers.
Ang isang quadcopter ay marahil ang pinakasimpleng lumilipad na makina na nangangailangan ng minimum na halaga ng aerodynamic katumpakan at mga komplikasyon, at samakatuwid ay hindi nakakagulat, maaari itong makakuha ng isang napakalawak na katanyagan sa iba't ibang mga libangan na maaaring matagumpay na itayo ito .... isang makina na maaari talaga silang lumipad at kontrolin sa kanilang sariling kalooban.
Ang Quadcopter Dynamics
Ang katotohanan na ang isang quadcopter drone ay ang pinakasimpleng sa mga tuntunin ng teknikal at dynamics ay talagang dahil sa paglahok ng 4 na mga propeller at isang balanseng istraktura ng frame, na nagbibigay-daan sa makina na lumipad na may medyo mahusay na balanse, kahit na sa mga mahirap na kondisyon sa klimatiko.
Ngunit ang pagiging simple ay nagpapahiwatig din na ang system ay maaaring hindi maging mahusay tulad ng maginoo na mga modelo ng eroplano at chopper na masalimuot na dinisenyo para sa pagpapakita ng matinding kahusayan sa mga tuntunin ng bilis at pagkonsumo ng gasolina, at syempre ang kakayahan sa pagdala ng load ... lahat ng ito ay maaaring maging mahalagang kulang sa isang tipikal na quadcopter system.
Gayunpaman, tungkol sa isang libangan na proyekto ay nababahala, ang makina na ito ay naging perpektong pagpipilian para sa karamihan ng mga taong mahilig na napakasisiyahan at nakakaintriga na bumuo ng kanilang lumilipad na makina na kanilang sarili, sa bahay, na sa huli ay 'nakikinig' at lumilipad sa anumang direksyon ng Mas gusto ng gumagamit na ilipat ito.
Gayunpaman, para sa isang bagong manlalaro, na maaaring hindi masyadong kaalaman sa teknikal ay maaaring makahanap ng kahit simpleng machine na ito na lubhang kumplikado upang maunawaan, dahil lamang sa karamihan sa mga kaugnay na impormasyon na ipinakita sa buong maraming mga website na nabigo upang talakayin ang konsepto ng malusog at sa isang 'wika' na baka umangkop sa isang karaniwang tao.
Partikular na naisulat ang artikulong ito para sa mga hindi masyadong teknikal na mga tao na interesado na bumuo ng isang kamangha-manghang lumilipad na makina ngunit nahihirapan na digest ang paksa.
Bakit ang mga Quadcopter ay napakadaling Bumuo Ngayon
Naisip mo ba kung bakit ang mga quadcopter at drone ay napakadaling itayo sa mundo ngayon at marahil ay imposible nang mas maaga gamit ang kuryente?
Karaniwan ito ay dahil sa pag-unlad at pagpapahusay ng Li-Ion Baterya. Ang mga ito ay lubos na mahusay na anyo ng mga baterya na magagamit ngayon na nag-aalok ng kamangha-manghang lakas sa timbang na ratio. Kasama nito, ang pag-imbento ng mga motor ng BLDC at lubos na pinong permanenteng mga motor na pang-magnet ay nag-ambag din sa paggawa ng mga drone na madaling maiayos.
Ang baterya ng Li-Ion ay nakapagbibigay ng kahanga-hangang dami ng paikot na metalikang kuwintas sa mga motor na nagiging sapat na sapat upang itulak ang yunit ng quadcopter sa isang mataas na altitude sa itaas na lupa sa loob ng mga segundo, at pinapayagan din itong manatili sa hangin na dala ng mahabang tagal ng paggawa ng oras ang pagganap napaka mahusay at kapaki-pakinabang.
Paano Lumilipad ang Quadcopter
Tumalon tayo ngayon sa tamang paraan at maunawaan kung ano ang mga mahahalagang bagay na kinakailangan upang matagumpay na makalipad ang isang quadcopter. Narito ang mga pangunahing kaalaman upang matagumpay na gawin ang makina na maayos na lumipad:


1) Karaniwan ang machine ay nangangailangan ng isang matatag at malakas na katawan, ngunit lubos na magaan sa timbang. Maaari itong gawa-gawa o tipunin gamit ang guwang na square aluminium extrusion pipes, sa pamamagitan ng naaangkop na mga butas sa pagbabarena at pag-aayos ng frame na may mga mani at bolt.
2) Ang istraktura ay dapat na nasa anyo ng isang perpektong '+' o isang perpektong 'x', hindi ito gumagawa ng pagkakaiba hangga't ang anggulo sa pagitan ng mga 'tumatawid' na tubo ay nasa 90 degree bawat isa.

Ang mga pangunahing elemento na kinakailangan para sa pagbuo ng isang quadcopter ay maaaring makita sa sumusunod na imahe:

Bahagi ng Simulation ng Assembly
Ang magaspang na animated na simulation sa ibaba ay nagpapakita tungkol sa kung paano tipunin ang mga ipinakitang elemento nang magkakasama:

Paano Bumuo ng Framework ng Quadcopter
Ang aluminyo para sa frame na '+' ay maaaring makuha sa pamamagitan ng naaangkop na paggupit at sukat na handa na ginawa na tubo ng extrusion ng tubo, tulad ng ipinakita sa ibaba:

Ang sukat ng frame ay kamag-anak at samakatuwid ay hindi mahalaga, maaari kang bumuo ng isang malawak na frame na may mga motor na karapat-dapat malayo o bumuo ng isang medyo compact na istraktura ng frame kung saan ang mga motor ay hindi masyadong malawak na magkahiwalay ... bagaman dapat tiyakin na ang Ang mga propeller ay malayo sa bawat isa para sa pagpapagana ng mas mahusay na balanse at balanse.
3) Ang istraktura ng frame na '+' ay dapat na nilagyan ng isang parisukat na plataporma sa gitnang seksyon kung saan ang mga braso ng frame ay nagtagpo at tumatawid sa bawat isa. Maaari itong maging isang mahusay na pinakintab na aluminyo plate na naaangkop na sukat para sa kumportableng pagtanggap ng lahat ng kinakailangang electronics at mga kable.
Sa gayon ang sentral na plato o ang platform ay karaniwang kinakailangan para sa pag-install at pabahay ng mga electronics ng system na sa huli ay magiging responsable para sa pagkontrol ng iyong quadcopter.
4) Kapag nakumpleto na ang balangkas sa itaas, ang mga motor ay kinakailangan upang maayos sa mga dulo ng mga cross bar, tulad ng ipinakita sa mga nasa itaas na numero.
5) Hindi na kailangang sabihin na ang lahat ng naaangkop na trabaho ay kailangang gawin nang may ganap na kawastuhan, at perpektong pagkakahanay, maaaring kailanganin nito ang pag-ugnay ng isang bihasang tagatha para sa trabaho.
Dahil ang lahat sa disenyo ay nasa pares, ang pag-align ng mga elemento nang tumpak ay hindi talaga magiging mahirap, tungkol lamang sa sukat at pag-angkop sa mga pares ng mas maraming pagkakapareho maaari, na tiyakin din ang isang maximum na antas ng balanse, balanse at pag-sync para sa system.
Kapag nabuo na ang balangkas, oras na upang isama ang mga elektronikong circuit sa mga nauugnay na motor. Kailangang gawin ito alinsunod sa mga tagubiling ibinigay sa ibinigay na manu-manong circuit.
Ang mga circuit board ay maaaring mailagay sa ilalim na bahagi ng gitnang plato na may naaangkop na pabahay o sa ibabaw ng plato, muli na may isang naaangkop na gabinete para sa nakapaloob na mahigpit na ito.

Pag-unawa sa Direksyon ng Paikot ng mga Propeller
Sinusuri ang direksyon ng Pag-ikot ng mga propeller ng Motor para sa isang Balanseng Itaas-ng:
Sumangguni sa nasa itaas na animated na simulation, ang direksyon ng pag-ikot ng mga motor propeller ay dapat na nakahanay sa sumusunod na pamamaraan:
Kailangan lamang na maging katulad na ang mga motor sa dulo ng isang tungkod ay dapat magkapareho ngunit magkakaiba sa iba pang direksyon ng motor na pamalo, ibig sabihin kung ang isang pamalo ay may mga motor na umiikot sa direksyon ng relo, pagkatapos ay ang mga motor sa dulo ng iba pang pantulong ang tungkod ay dapat na iakma upang paikutin ang laban sa orasan. direksyon
Mangyaring mag-refer sa simulation sa itaas upang maunawaan nang tama ang paggalaw ng counter-acting ng mga motor na maaaring kailanganin upang maitalaga sa mga motor para matiyak ang balanseng pagkuha ng
Paano makontrol ang direksyon ng quadcopter sa pamamagitan ng pagkontrol sa bilis ng mga motor.
Oo, ang direksyon ng paglipad ng quadcopter ay maaaring mai-tweak at makontrol ayon sa iyong sariling hangarin at gagawin sa pamamagitan lamang ng paglalapat ng iba't ibang mga bilis (RPM) sa mga nag-aalala na motor.
Ipinapakita ng mga sumusunod na imahe kung paano mailalapat ang pangunahing paghahatid ng bilis sa mga nauugnay na motor upang makamit at maipatupad ang anumang nais na direksyong paglipad sa makina:




Tulad ng ipinahiwatig sa mga diagram sa itaas, sa pamamagitan ng naaangkop na pagbawas ng bilis ng isang hanay ng mga motor, o pagdaragdag ng bilis ng kabaligtaran na hanay ng mga motor, o pag-tweak ng mga bilis ayon sa bawat kagustuhan na maaaring gawin ang quadcopter upang maglakbay sa hangin sa anumang nais na tiyak na direksyon.
Ang mga imahe sa itaas ay nagpapahiwatig ng mga pangunahing direksyon, tulad ng pasulong, baligtad, kanan, kaliwa atbp ... subalit ang anumang iba pang kakaibang direksyon ay maaari ding mahusay na ipatupad sa pamamagitan ng angkop na pag-aayos ng mga bilis ng mga nauugnay na motor o maaaring isang solong motor lamang.
Halimbawa upang pilitin ang makina na lumipad patungo sa direksyon ng N / W, maaaring dagdagan ang bilis ng motor na S / E lamang, at para sa pagpapagana ng makina sa direksyong N / E, ang bilis ng S / W motor ay maaaring dagdagan ... at iba pa. Kailangan lamang na magsanay hanggang sa ang buong kontrol ng quadcopter ay maaaring matamo at mabisado ng gumagamit.
Pagdidisenyo ng isang Praktikal na Quadcopter
Sa ngayon natutunan namin ang tungkol sa pangunahing konstruksyon ng drone body at hardware, ngayon alamin natin kung paano gumawa ng isang quadcopter o isang drone circuit nang mabilis at murang gamit ang mga napaka-ordinaryong sangkap. Sa isa sa aking naunang mga post natutunan namin kung paano gumawa ng isang medyo kumplikado at samakatuwid mahusay na quadcopter flying machine nang hindi gumagamit ng microcontroller, para sa karagdagang impormasyon nais mong dumaan sa mga sumusunod na post:
Remote Control Circuit nang walang MCU | Elektronikong Circuit
Sa kasalukuyang artikulo sinusubukan naming gawing mas simple ang disenyo sa itaas sa pamamagitan ng pag-aalis ng mga motor na walang brotsa at palitan ito ng mga brush motor, at dahil dito ginagawang posible upang mapupuksa ang kumplikado Module ng circuit ng driver ng BLDC .
Dahil ang mga detalye ng mekanikal na pagtatayo ng quadcopter ay tinalakay na sa itaas nang kumpleto, haharapin lamang namin ang seksyon ng disenyo ng circuit at matutunan kung paano ito maitayo para sa paglipad ng ipinanukalang pinakasimpleng circuit ng drone.
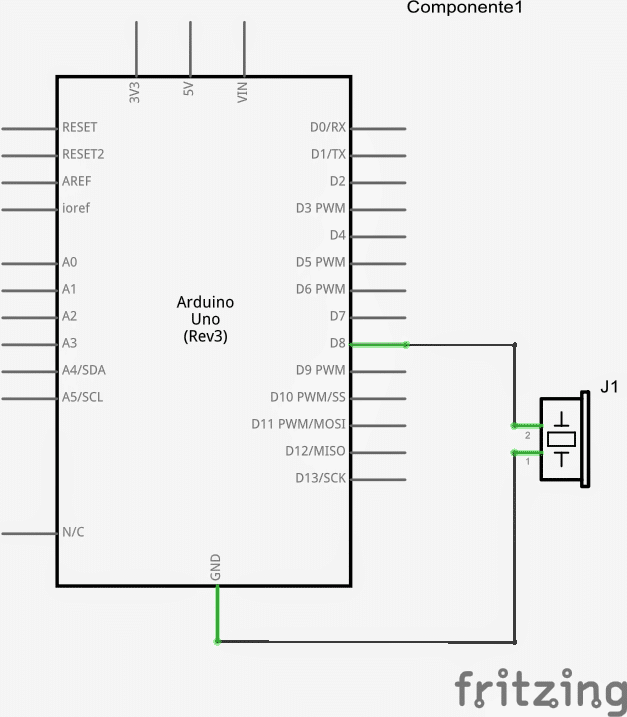
Tulad ng nabanggit kanina, ang simpleng quadcopter na ito ay nangangailangan lamang ng pangunahing mga module ng RF na remote control tulad ng ipinakita sa imaheng halimbawa sa ibaba:

Kakailanganin mo bilhin ang mga modyul na RF na ito mula sa anumang online store o mula sa iyong lokal na electronic ekstrang dealer:
Bukod sa nabanggit sa itaas Ang Remote ng RF ay mga module Kakailanganin din ang 4 na permanenteng magnet na brush na motor na aktwal na bumubuo sa puso ng drone machine. Maaari itong tinukoy sa sumusunod na imahe na may mga ibinigay na paglalarawan, o anumang iba pang katulad sa bawat kinakailangang mga pagtutukoy ng gumagamit:

Mga Detalye ng Elektrikal ng Motor:
- 6V = operating boltahe (rurok 12V)
- 200mA = kasalukuyang pagpapatakbo
- 10,000 = RPM
Listahan ng Mga Bahagi
- 1K, 10K 1/4 watt = 1 bawat isa
- 1uF / 25V Capacitor = 1no
- Preset 10K o 5K = 1no
- Rx = 5 watt wirewound risistor, ang halaga na kumpirmahin sa pag-eksperimento.
- IC 555 = 1no
- 1N4148 Diodes = 2nos
- IRF9540 Mosfet = 1no
- 6V Motor Brush Type = 4nos
- May kakayahang umangkop na mga wire, solder, fluks atbp.
- Pangkalahatang layunin PCB para sa pagtitipon ng mga bahagi sa itaas
- 4 Channel RF Remote Control Module, tulad ng ipinakita sa mga nauugnay na imahe.
- Mga Channel sa Aluminyo, turnilyo, mani, plato atbp tulad ng ipinaliwanag sa artikulo.
- Ang baterya tulad ng ipinakita sa ibaba:

Paano i-configure ang Remote Control Receiver sa mga Motors
Bago maunawaan kung paano i-configure ang remote control receiver gamit ang mga quadcopter motor, mahalagang malaman kung paano ang bilis ng motor ay dapat na ayusin o nakahanay para sa pagbuo ng kinakailangang mga paggalaw ng kaliwa, kanan, pasulong, atatras.
Pangunahin mayroong dalawang paraan ng isang quadcopter na maaaring paganahin upang ilipat, na nasa '+' at ang 'x'modes. Sa aming disenyo ginagamit namin ang pangunahing '+' mode ng paggalaw para sa aming drone, tulad ng ipinahiwatig sa sumusunod na diagram:

Ang pagtukoy sa nasa itaas na diagram ay napagtanto namin na kailangan lang namin nang naaangkop na taasan ang mga bilis ng mga nauugnay na motor para sa pagpapatupad ng nais na mga maneuver sa direksyon sa drone.
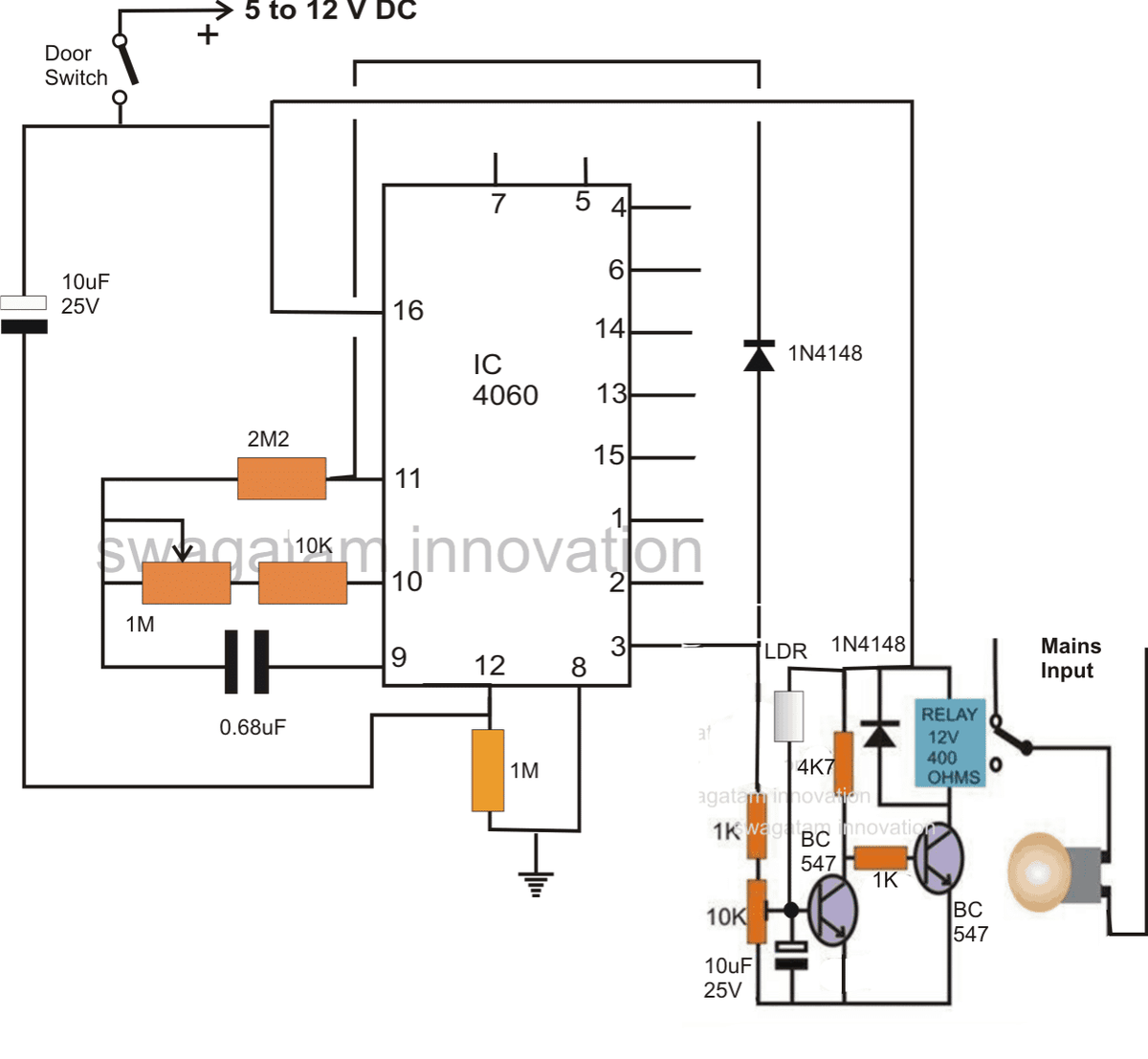
Ang pagtaas ng mga bilis na ito ay maaaring ipatupad sa pamamagitan ng pag-configure ng mga remote control relay ayon sa sumusunod na diagram ng mga kable. Sa diagram sa ibaba makikita natin ang isang IC 555 PWM circuit wired gamit ang 4 na relay ng module ng remote control receiver ng 6 na relay (ang 1 relay na hindi ginagamit at maaaring alisin lamang upang makaalis ang puwang at timbang).
Inaayos ang PWM
Tulad ng nasaksihan sa diagram, ang feed ng PWM ay konektado sa lahat ng mga contact na N / C ng mga relay, na nagpapahiwatig na normal na ang quadcopter ay magiging sa pamamagitan ng uniporme at pantay na feed na PWM na ito, na ang ikot ng tungkulin ay maaaring naayos nang una na ang quadcopter ay makakakuha ng isang wastong tinukoy na halaga ng thrust, at altitude.
Maaari itong mag-eksperimento sa pamamagitan ng naaangkop na pagsasaayos ng ipinakitang palayok na PWM.
Paano I-configure ang Mga Contay ng Relay
Ang mga contact na N / O ng mga relay ay maaaring makita nang direktang naka-wire na may positibong supply, kaya't tuwing ang isang kaugnay na pindutan ay pinindot sa remote na handset ng transmitter, ang kaukulang relay ay pinapagana sa module ng tatanggap, na kung saan ay nagbibigay-daan sa may-katuturang motor na makakuha ang buong 12V na supply mula sa baterya.
Pinapayagan ng operasyon sa itaas ang pinapagana ng motor na makakuha ng mas maraming bilis kaysa sa natitirang mga motor na nagpapahintulot sa quadcopter na lumipat patungo sa itinakdang direksyon.
Sa sandaling pinakawalan ang remote button, agad na humihinto ang drone at patuloy na magpalipat-lipat sa pare-pareho na mode.
Kapansin-pansin, ang iba pang mga paggalaw ng direksyon ay maaaring makamit sa pamamagitan lamang ng pagpindot sa iba pang mga nakatalagang pindutan, sa remote na handset.
Ang pinakamataas na relay ay para masiguro ang isang ligtas na landing ng makina, ginagawa ito sa pamamagitan ng pagdaragdag ng isang kasalukuyang bumababa na risistor sa serye na may contact na N / O ng ipinakitang relay.
Ang halaga ng resistor na ito ay dapat na kalkulahin ng ilang eksperimento tulad ng na ang quadcopter ay umikot sa paligid ng isang pares ng mga paa sa itaas ng lupa sa tuwing ang risistor na ito ay na-toggle sa pamamagitan ng nakakabit na relay.
Diagram ng Circuit

Ang ipinakitang mga relay ay ang bahagi ng tatanggap ng module ng RF, na ang mga contact ay paunang hindi konektado (blangko bilang default) at kailangang i-wire tulad ng ipinahiwatig sa diagram sa itaas.
Ang RF remote receiver ay dapat na mai-install sa loob ng quadcopter at ang mga relay nito ay naka-wire sa mga nauugnay na motor at baterya ayon sa ipinakita sa itaas na layout.
Maaari kang makakita ng ilang mga konektor (berdeng kulay) na maaaring hindi kinakailangang magdagdag ng timbang sa drone. Maaari mong alisin ang lahat upang mabawasan ang timbang, at ikonekta ang nauugnay na mga wire nang direkta sa PCB sa pamamagitan ng paghihinang.
Paano Gumagalaw ang Drone:
Tulad ng ipinaliwanag sa talakayan sa itaas, kapag ang isang partikular na remote button ay pinindot, pinapagana nito ang kaukulang relay ng module na quadcopter na nagdudulot ng nauugnay na motor na mas mabilis na gumalaw.
Ang operasyon na ito naman ay pinipilit ang makina na ilipat sa direksyong tapat sa motor na inililipat upang paikutin sa mas mabilis na RPM.
Kaya halimbawa, ang pagdaragdag ng bilis ng southern motor ay nagiging sanhi ng paggalaw ng makina patungo sa hilaga, pagdaragdag ng hilagang motor ay sanhi nito upang lumipat ng timog, katulad ng pagdaragdag ng bilis ng silangan ng motor na sanhi nito upang lumipat ng kanluran at sa kabaligtaran.
Kapansin-pansin, ang pagtaas ng timog / silangan na mga motor ay nagbibigay-daan sa quadcopter upang lumipat patungo sa tapat ng hilaga / kanluran na nasa dayagonal mode .... at iba pa.
Mga kalamangan at kahinaan ng nasa itaas ay ipinaliwanag ang Simple Qaudcopter remote control circuit.
Mga kalamangan
- Mura, at madaling mabuo kahit ng isang bagong libangan.
- Hindi nangangailangan ng mga kumplikadong operasyon ng joystick.
- Maaaring makontrol gamit ang isang solong 6 na module ng remote control
Kahinaan
- Hindi gaanong mahusay sa mga tuntunin ng pag-back up ng baterya dahil sa paglahok ng mga brush na motor
- Ang bilis ng direksyon ay pare-pareho at hindi maaaring iba-iba sa pamamagitan ng handset ng remote control
- Ang pagmamaniobra ay maaaring hindi makinis sa halip medyo maalog habang inililipat ang mga pindutan.
Nakaraan: Ipinaliwanag ang Force Sensing Resistor Susunod: Capacitive Voltage Divider