Sa artikulong ito susubukan naming maunawaan kung paano ipinatupad ang scalar control algorithm para sa pagkontrol sa bilis ng induction motor na may prangkang mga kalkulasyon, at nakakamit pa rin ang isang makatwirang mahusay na linearly variable na kontrol sa bilis ng motor.

Ang mga ulat mula sa maraming nangungunang pagtatasa sa merkado ay isiniwalat na induction motor ang pinakapopular pagdating sa paghawak ng mabibigat na application na may kaugnayan sa motor na pang-industriya at mga trabaho. Ang mga pangunahing dahilan sa likod ng katanyagan ng mga induction motor ay karaniwang sanhi ng mataas na antas ng pagiging matatag nito, higit na pagiging maaasahan sa mga tuntunin ng mga isyu sa pagkasira, at medyo mataas na kahusayan sa pag-andar.
Sinabi nito, ang mga motor na induction ay may isang karaniwang downside, dahil hindi madaling kontrolin ang mga ito sa ordinaryong maginoo na pamamaraan. Ang pagkontrol sa mga motor na induction ay medyo hinihingi dahil sa kanyang kumplikadong pagsasaayos ng matematika, na pangunahing kasama ang:
- Non-linear na tugon sa pangunahing saturation
- Ang kawalang-tatag sa form oscillations dahil sa iba't ibang temperatura ng paikot-ikot.
Dahil sa mga kritikal na aspeto na ito sa pagpapatupad ng induction motor control na optimal na hinihingi ang isang lubusang kinakalkula na algorithm na may mataas na pagiging maaasahan, halimbawa gamit ang isang 'control vector' na pamamaraan, at karagdagan na gumagamit ng isang microcontroller based na proseso ng pagproseso.
Pag-unawa sa Pagpapatupad ng Pagkontrol sa Scalar
Gayunpaman may umiiral na ibang paraan na maaaring mailapat para sa pagpapatupad ng induction motor control gamit ang isang mas madaling pagsasaayos, ito ay ang scalar control na nagsasama ng mga diskarteng hindi drive ng vector.
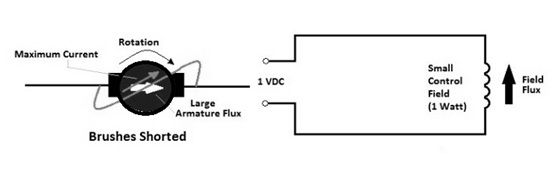
Tunay na posible na paganahin ang isang motor na induction ng AC sa isang matatag na estado sa pamamagitan ng pagpapatakbo nito ng isang direktang feedback ng boltahe at kasalukuyang mga kontroladong system.
Sa pamamaraang ito ng scalar, ang scalar variable ay maaaring mai-tweak sa sandaling ang tamang halaga ay nakamit alinman sa pamamagitan ng eksperimento sa praktikal o sa pamamagitan ng angkop na mga formula at kalkulasyon.
Susunod, ang pagsukat na ito ay maaaring magamit para sa pagpapatupad ng motor control sa pamamagitan ng isang bukas na loop circuit o sa pamamagitan ng isang closed topology ng loop ng feedback.
Kahit na ang scalar na paraan ng pagkontrol ay nangangako ng isang makatuwirang mahusay na mga resulta ng matatag na estado sa motor, ang pansamantalang tugon nito ay maaaring hindi nasa marka.
Paano Gumagana ang Mga Motors ng Induction
Ang salitang 'induction' sa mga induction motor ay tumutukoy sa natatanging paraan ng operasyon nito kung saan ang pag-magnetize ng rotor ng paikot na stator ay naging isang mahalagang aspeto ng operasyon.
Kapag ang AC ay inilapat sa paikot-ikot ng stator, ang oscillating magnetic field mula sa stator winding ay nakikipag-ugnay sa armature ng rotor na lumilikha ng isang bagong magnetic field sa rotor, na kung saan ay tumutugon sa stator magnetic field na nag-uudyok ng isang mataas na halaga ng rotational torque sa rotor . Ang paikot na metalikang kuwintas na ito ay nagbibigay ng kinakailangang mabisang mekanikal na output sa makina.
Ano ang 3-Phase Squirrel Cage Induction Motor
Ito ang pinakapopular na variant ng induction motors at malawak na ginagamit sa mga pang-industriya na aplikasyon. Sa isang motor na induction na squirrel cage, ang rotor ay nagdadala ng isang serye ng bar tulad ng mga conductor na pumapalibot sa axis ng rotor na nagpapakita ng isang natatanging hawla tulad ng istraktura at kaya ang pangalang 'squirrel cage'.
Ang mga bar na ito na may porma ang hugis at tumatakbo sa paligid ng axis ng rotor ay nakakabit na may makapal at matatag na mga singsing na metal sa mga dulo ng mga bar. Ang mga singsing na metal ay hindi lamang makakatulong upang ma-secure ang mga bar nang malakas sa lugar ngunit ipatupad din ang isang mahalagang kuryenteng maikling pag-ikot sa mga bar.
Kapag ang paikot-ikot na stator ay inilapat na may isang pagkakasunud-sunod na 3-phase na sinusoidal alternating kasalukuyang, ang nagreresultang magnetic field ay nagsisimula ring gumalaw na may parehong bilis ng 3 phase stator sine frequency (ωs).
Dahil ang pagpupulong ng squirrel cage rotor ay gaganapin sa loob ng paikot-ikot na stator, sa itaas na alternating 3 phase magnetic field mula sa stator winding ay tumutugon sa pagpupulong ng rotor na nag-uudyok ng isang katumbas na magnetic field sa mga conductor ng bar ng pagpupulong ng cage.
Pinipilit nito ang isang pangalawang magnetikong patlang upang magtayo sa paligid ng mga rotor bar, at dahil dito ang bagong magnetic field na ito ay pinilit na makipag-ugnay sa stator field, na nagpapatupad ng isang rotational torque sa rotor na sumusubok na sundin ang direksyon ng stator magnetic field.

Sa proseso, ang bilis ng rotor ay sumusubok na makamit ang bilis ng dalas ng stator, at habang papalapit ito sa stator kasabay na bilis ng magnetikong patlang, ang pagkakaiba-iba ng bilis ng bilis ng pagitan ng bilis ng dalas ng stator at ang bilis ng pag-ikot ng rotor ay nagsisimulang bumababa, na nagiging sanhi ng pagbawas ng magnetiko Pakikipag-ugnayan ng magnetic field ng rotor sa magnetic field ng stator, na sa paglaon ay binabawasan ang metalikang kuwintas sa rotor, at ang katumbas na output ng kuryente ng rotor.
Ito ay humahantong sa isang minimum na lakas sa rotor at sa bilis na ito ang rotor ay sinasabing nakakuha ng isang matatag na estado, kung saan ang pagkarga sa rotor ay katumbas at tumutugma sa metalikang kuwintas sa rotor.
Ang pagtatrabaho ng isang induction motor bilang tugon sa isang pagkarga ay maaaring ma-buod tulad ng ipinaliwanag sa ibaba:
Dahil naging sapilitan ito upang mapanatili ang isang mainam na pagkakaiba sa pagitan ng bilis ng rotor (baras) at ang bilis ng dalas ng panloob na stator, ang bilis ng rotor na talagang hawakan ang pagkarga, umiikot sa isang bahagyang nabawasan na bilis kaysa sa bilis ng dalas ng stator. Sa kabaligtaran, kung ipinapalagay namin na ang stator ay inilalapat na may 50Hz 3 phase supply, pagkatapos ang anggular na bilis ng dalas ng 50Hz na ito sa buong stator winding ay palaging bahagyang mas mataas kaysa sa tugon sa bilis ng pag-ikot ng rotor, likas na pinapanatili ito upang matiyak ang isang pinakamainam lakas sa rotor.
Ano ang Slip sa Induction Motor
Ang kamag-anak na pagkakaiba sa pagitan ng angular na bilis ng dalas ng stator at ang tumutugon na bilis ng pag-ikot ng rotor ay tinatawag na 'slip'. Ang slip ay kailangang naroroon kahit na sa mga sitwasyon kung saan pinapatakbo ang motor na may diskarte na nakatuon sa larangan.
Dahil ang rotor shaft sa mga motor na induction ay hindi nakasalalay sa anumang panlabas na paggulo para sa pag-ikot nito, maaari itong gumana nang walang maginoo na slip ring o brushes na tinitiyak ang halos zero na pagkasira, mataas na kahusayan at subalit mura sa pagpapanatili nito.
Ang kadahilanan ng metalikang kuwintas sa mga motor na ito ay natutukoy ng anggulo na itinatag sa pagitan ng mga magnetic fluxes ng stator at ng rotor.
Sa pagtingin sa diagram sa ibaba, maaari naming makita na ang bilis ng rotor ay nakatalaga bilang Ω, at ang mga frequency sa stator at ang rotor ay natutukoy ng parameter na 's' o ang slip, na ipinakita sa pormula:
s = ( ω s - ω r ) / ω s
Sa expression sa itaas, ang s ay ang 'slip' na nagpapakita ng pagkakaiba sa pagitan ng bilis ng kasabay na dalas ng stator at ang tunay na bilis ng motor na nabuo sa shaft ng rotor.

Pag-unawa sa Scalar Speed Control Theory
Sa induction motor control konsepto kung saan Teknikal V / Hz ay nagtatrabaho, ang kontrol sa bilis ay ipinatupad sa pamamagitan ng pag-aayos ng boltahe ng stator na may paggalang sa dalas na tulad ng air gap flux ay hindi kailanman maaaring lumihis lampas sa inaasahang saklaw ng steady-state, sa madaling salita pinananatili ito sa loob ng tinatayang steady-state na ito halaga, at samakatuwid ay tinatawag din itong kontrol sa scalar paraan dahil ang diskarte ay mabigat na nakasalalay sa matatag na estado na dynamics para sa pagkontrol ng bilis ng motor.
Maaari naming maunawaan ang pagtatrabaho ng konsepto na ito sa pamamagitan ng pagtukoy sa sumusunod na pigura, na nagpapakita ng pinasimple na pamamaraan ng isang diskarte sa pag-kontrol sa scalar. Sa pag-set up ay ipinapalagay na ang stator resist (Rs) ay zero, habang ang stator leakage Inductance (LIs) ay humanga sa rotor leakage at magnetizing inductance (LIr). Ang (LIr) na aktwal na naglalarawan ng laki ng air gap flux ay maaaring makita na naitulak bago ang kabuuang leakage inductance (Ll = Lls + Llr).

Dahil dito, ang air gap flux na nilikha ng kasalukuyang magnetizing ay nakakakuha ng isang tinatayang halaga na malapit sa ratio ng dalas ng stator. Sa gayon ang expression ng phasor para sa isang matatag na pagtatasa ng estado ay maaaring nakasulat tulad ng sumusunod:

Para sa mga Induction motor na maaaring tumatakbo sa kanilang mga linear magnetikong rehiyon, ang Lm ay hindi magbabago at mananatiling pare-pareho, sa mga ganitong kaso ang equation sa itaas ay maaaring ipahayag bilang:

Kung saan ang V at Λ ay ang mga halaga ng boltahe ng stator at pagkilos ng bagay ng stator ayon sa pagkakabanggit, samantalang ang Ṽ ay kumakatawan sa parameter ng phasor sa disenyo.
Ang huling ekspresyon sa itaas ay malinaw na nagpapaliwanag na hangga't ang ratio ng V / f ay pinananatili nang walang kinalaman sa anumang pagbabago sa dalas ng pag-input (f), kung gayon ang pagkilos ng bagay ay nananatiling pare-pareho, na nagbibigay-daan sa toque na gumana nang hindi nakasalalay sa dalas ng boltahe ng supply . Nagpapahiwatig iyon kung ang ΛM ay pinananatili sa isang pare-pareho na antas, ang ratio ng Vs / ƒ ay maibigay din sa isang pare-pareho na bilis na nauugnay. Samakatuwid tuwing ang bilis ng motor ay nadagdagan, ang boltahe sa stator paikot-ikot ay kailangan ding proporsyonal na tumaas, upang ang isang pare-pareho Vs / f ay maaaring mapanatili.
Gayunpaman dito ang slip ay ang pagpapaandar ng pagkarga na nakakabit sa motor, ang kasabay na bilis ng dalas ay hindi naglalarawan ng totoong bilis ng motor.
Sa kawalan ng isang load torque sa rotor, ang resulta na slip ay maaaring maging maliit na maliit, na nagpapahintulot sa motor na makamit ang malapit sa magkasabay na bilis.
Iyon ang dahilan kung bakit ang isang pangunahing Vs / f o isang V / Hz na pagsasaayos ay karaniwang maaaring walang kakayahan na magpatupad ng tumpak na kontrol sa bilis ng isang induction motor kapag ang motor ay nakakabit na may isang load torque. Gayunpaman ang isang bayad sa slip ay maaaring medyo madali ay ipinakilala sa system kasama ang pagsukat ng bilis.
Ang ipinahiwatig sa ibaba na representasyon ng grapiko ay malinaw na naglalarawan ng isang speed sensor sa loob ng isang closed loop V / Hz system.

Sa mga praktikal na pagpapatupad, karaniwang ang ratio ng boltahe ng stator at dalas ay maaaring nakasalalay sa pag-rate ng mismong mga parameter na ito.
Sinusuri ang V / Hz Speed Control
Ang isang pamantayang pagsusuri ng V / Hz ay maaaring masaksihan sa sumusunod na pigura.

Sa panimula ay makakakita ka ng 3 mga saklaw ng pagpili ng bilis sa loob ng isang profile na V / Hz, na maaaring maunawaan mula sa mga sumusunod na puntos:
- Tumutukoy sa pigura 4 kapag pinutol ang dalas ay nasa rehiyon na 0-fc, ang isang input ng boltahe ay nagiging mahalaga, na bubuo ng isang potensyal na pagbaba sa paikot-ikot na stator, at ang pagbagsak ng boltahe na ito ay hindi maaaring balewalain at kinakailangan na mabayaran sa pamamagitan ng pagtaas ng supply boltahe vs. Ipinapahiwatig nito na sa rehiyon na ito ang profile ng ratio ng V / Hz ay hindi isang linear function. Maaari naming suriin nang masuri ang putol ng dalas ng fc para sa naaangkop na boltahe ng stator na may tulong ng matatag na katumbas na circuit ng estado na may Rs having 0.
- Sa rehiyon fc-r (na-rate) Hz, nagagawa nitong magsagawa ng isang pare-pareho na relasyon ng Vs / Hz, sa kasong ito ang slope ng relasyon ay nangangahulugan ng dami ng pagkakalusot ng puwang ng hangin .
- Sa rehiyon na lampas sa f (na-rate), na tumatakbo sa mas mataas na mga frequency, naging imposibleng isagawa ang ratio ng Vs / f sa pare-pareho na rate, dahil sa posisyon na ito ang boltahe ng stator ay may gawi na limitado sa halagang f (na-rate). Nangyayari ito upang matiyak na ang paikot-ikot na stator ay hindi napailalim sa isang pagkasira ng pagkakabukod. Dahil sa sitwasyong ito, ang nagresultang air gap flux ay may posibilidad na makompromiso at mabawasan, na humahantong sa isang tumutugmang pagbawas ng torotor ng rotor. Ang yugto ng pagpapatakbo na ito sa mga motor na induction ay tinatawag na bilang 'Rehiyon ng pag-field' . Upang maiwasan ang ganitong uri ng sitwasyon, karaniwang isang pare-pareho na panuntunan sa V / Hz ay hindi sinusunod sa mga saklaw na dalas na ito.
Dahil sa pagkakaroon ng isang pare-pareho na stator magnetic flux anuman ang pagbabago ng dalas sa paikot-ikot na staor, ang toque sa rotor ngayon ay umaasa lamang sa bilis ng slip, ang epektong ito ay makikita sa pigura 5 sa itaas
Sa naaangkop na regulasyon ng bilis ng slip, ang bilis ng isang motor na induction ay maaaring mabisa na kontrolado kasama ng metalikang kuwintas sa rotor load sa pamamagitan ng paggamit ng isang pare-pareho na prinsipyo ng V / Hz.
Samakatuwid kung ito ay isang bukas o isang closed-loop mode ng kontrol sa bilis, parehong maaaring ipatupad gamit ang pare-pareho na panuntunan ng V / Hz.
Ang isang Open loop mode ng kontrol ay maaaring gamitin sa mga application kung saan ang kawastuhan ng kontrol sa bilis ay maaaring hindi isang mahalagang kadahilanan, tulad ng sa mga yunit ng HVAC, o fan at blower tulad ng mga kagamitan sa bahay. Sa ganitong mga kaso ang dalas sa pagkarga ay matatagpuan sa pamamagitan ng pagtukoy sa kinakailangang antas ng bilis ng motor, at inaasahan na ang bilis ng rotor na humigit-kumulang na sundin ang instant na kasabay na bilis. Ang anumang anyo ng pagkakaiba sa bilis na nagmumula sa slip ng motor ay karaniwang hindi pinapansin at tinanggap sa mga naturang aplikasyon.
Sanggunian: http://www.ti.com/lit/an/sprabq8/sprabq8.pdf
Nakaraan: Pag-unawa sa Pull-Up at Pull-Down Resistors na may Mga Diagram at Formula Susunod: 18650 2600mAh Baterya Datasheet at Paggawa