Ipinapaliwanag ng post ang isang simpleng linya na kinokontrol ng motor ng circuit ng driver ng motor, na gumagana sa pamamagitan ng pagtugon sa isang katumpakan na pahalang na linya ng laser, na nabuo mula sa isang linya na antas ng laser na aparato, at awtomatikong inaayos ang pagkakahanay ng nakakonektang tool o ang trabaho sa trabaho na may matinding pagiging perpekto at kawastuhan.
Ano ang Line Laser
Ang kagamitan ng linya ng laser ay isang mataas na katumpakan na elektronikong kapalit ng mga karpintero na nasa edad na antas ng espiritu na nakahanay.
Ang linya ng aparato ng laser ay talagang isang advanced na kagamitan sa paglabas ng laser na maaaring makabuo ng isang 360 ° ang mataas na katumpakan ay nag-iilaw ng pahalang na linya ng laser, para sa pagbibigay ng isang calibrating na sanggunian sa lahat ng mga pang-industriya o konstruksyon na mga trabaho sa engineering, upang ang wakas na resulta ng trabaho ay perpektong tuwid at nakahanay nang walang kaunting error.
Ang circuit ay hiningi ng isa sa mga nakatuon na mambabasa ng blog na ito na si G. Rafal.
Ang detalyadong mga talakayan hinggil sa gumaganang pamamaraan ng linya na kinokontrol ng motor ng motor ay maaaring malaman mula sa mga sumusunod na talata:
Layunin ng Disenyo
Ginoo. Rafal: Napaka bago ko dito. Gumawa ako ng ilang pagsasaliksik sa nakaraang ilang linggo at hindi ko natagpuan ang eksaktong kailangan ko.
Magpapasalamat ako para sa anumang tulong. Naglakip ako ng larawan ng aking ideya. Nais kong makontrol ang dalawang 12 V DC motor na may antas ng laser.
Ang antas ng linya ng linya ng signal ang mga tatanggap.

Ang signal na ito ay magkakaroon upang makontrol ang direksyon ng 12 V DC motor. Paikutin ng motor ang sinulid na tungkod pabalik-balik upang ayusin ang taas ng tool.
Mula sa natuklasan ko, maraming mga photodiode na konektado sa kahanay, isang hanay upang makita ang laser sa itaas ng antas ng zero at ang iba pang nasa ibaba ng antas na iyon. Ang antas ng null ay ilang uri lamang ng pag-pause sa pagitan ng mga photodiode upang mapanatili ang paggising ng system. Laser sensor nang walang display. Nag-picture picture lang ako.
Kailangan ko ng H circuit circuit, ngunit lahat ng nahanap ko ay magagamit sa isang sistemang Arduino. Kung kinakailangan, makakabili ako ng isang nakahandang tulay para sa isang makatwirang presyo na hanggang sa $ 30
Sa isip na ito ay gagana sa parehong pula at berde na mga laser, ngunit ang mga haba ng daluyong ay ibang-iba na duda ako na magagawa ito at hindi ito gagana sa buong light spectrum.
Sa una, nais kong itakda ang antas ng sinag na ito na nakakabit sa mga engine na may mga up-down na pindutan. Masisiyahan ako kung ang pangalawang motor ay pagkatapos ay i-level ang sarili nito sa gyroscope habang itinatakda ito, ngunit kung wala ang Arduino maaaring napakahirap.
Nararamdaman ko kung ano ang sinusubukan kong gawin ay napakasimple na makakalayo ako nang hindi gumagamit ng Arduino. At pinipilit ko ang isang analog, dahil sa mahihirap na kundisyon sa isang lugar ng konstruksiyon at tila sa akin na mas maraming electronics, mas hindi maaasahan ang aparato.
Gagana lamang ito sa loob ng bahay, at ang distansya ng laser ay max 10m. Ang motor na nakita ko sa simula ay may malaking kasalukuyang pagkonsumo ng 200mA max 2.19 A, ngunit mayroon ding isang malaking metalikang kuwintas.
Power 18 V DC mula sa isang baterya ng Makita.
Salamat nang maaga para sa anumang mga mungkahi.
Pagbati mula sa Poland
Rafal
Swag : Mayroon akong pagkalito tungkol sa pagtatrabaho ng mga motor shaft. Ang may sinulid na tornilyo sa parehong mga motor ay itutulak ang tool, ngunit hindi nito maibabalik ito? Paano ito gagana?
Posible bang ipatupad ang pareho sa isang solong motor?
Ginoo. Rafal: Ang mga mas diretso na leveling straightedge ay maaaring 70 cm, para lamang sa maliliit na silid, hal. isang banyo upang makapasok ka sa pamamagitan ng isang pintuan.
Makina na walang drive, hinugot ng kamay, na-level lang ang straightedges. Sa video, ang dalawang dilaw na bagay sa mga masts ay mga detektor ng laser na mahigpit na nakakabit sa mga straightedge.
Ang laser ay nakatayo sa isang lugar na malayo at gumagawa ito ng isang pahalang na linya.
Ang mga motor ay ikakabit sa isang cart at ang may sinulid na tornilyo sa leveling straightedges na may mga laser detector. Dapat mayroong dalawang mga motor upang i-level ang magkabilang panig, ngunit ito ay isang imahe ng salamin.
Ang nag-iisang karaniwang bahagi ay magiging isang dalawang-channel na H-tulay na parang ginagawa ko ito mula sa isang nakahandang module at posibleng isang gyroscope, ngunit panaginip iyon :).
Mahalaga na may mga pindutan para sa kaliwa at kanang mga rebolusyon ng motor.
Ang pamamaraan ay ito. Isinasabit ko ang laser halimbawa 2 m sa itaas ng itinalagang antas ng sahig. Sinusukat ko ang 2 metro mula sa laser beam hanggang sa ilalim na gilid ng mga straightedges.
Kinokontrol ko ang mga pindutan ng pagpindot sa taas ang mga switch ay kumanan sa kaliwa upang ito ay katumbas ng 2 metro sa ibabang gilid ng mga straightedges. Inilagay ko ang mga detector sa mga masts upang ang laser beam ay nasa zero level sa pagitan ng mga seksyon ng photodiode. At ang natitira ay gagawin mismo
Sa kalakip inilalagay ko ang isang guhit ng operasyon ng detector.
Rafal
Disenyo ng Circuit

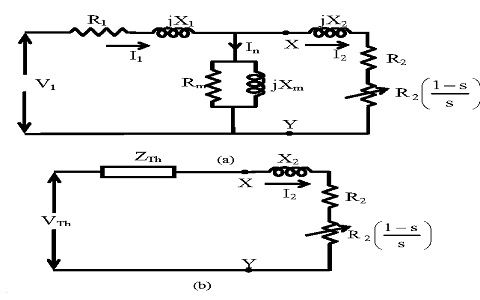
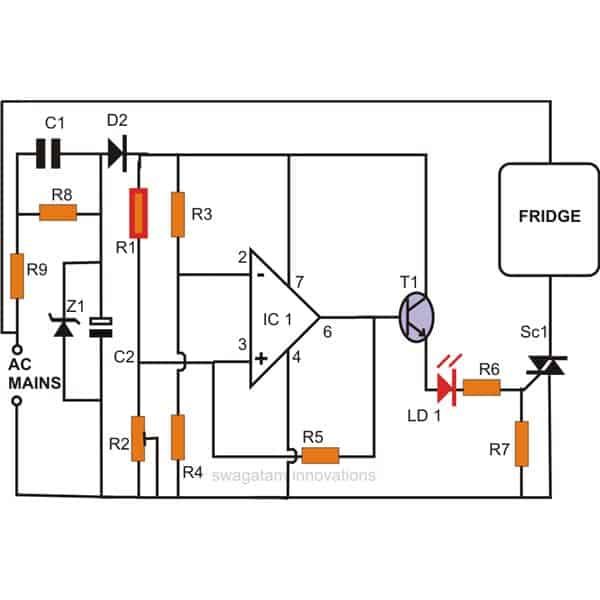
Sa pagtingin sa figure sa itaas, dalawang mga katulad na yugto ng circuit ay kinakailangan para sa pagtuklas at pagwawasto ng kaugnay na tool na kinokontrol ng motor na patungkol sa kawastuhan ng linya ng laser.
Ang dalawang magkatulad na yugto ay salamin ng mga imahe ng bawat isa tulad ng ipinakita sa ibaba:

Ang circuitry ay medyo prangka. Gumagana ito sa isang window comparator na nagsisiguro na ang mga motor ng drive ay hindi pagpapatakbo hangga't ang pares ng LDR ay nakalantad sa magkaparehong liwanag ng linya ng laser.
Ang isang kalahating boltahe ng suplay ay nabuo sa non-inverting input ng A1 at sa invertting input ng A2.
Sa sandaling ang isang pagpapalihis sa linya ng laser ay napansin (na maaaring mangyari kung ang tool na kinokontrol ng motor ay hindi nakahanay na tuwid), ang liwanag na nakakaapekto sa LDRs R1 at R2 ay nagbabago.
Sa sitwasyong ito, ang input boltahe sa kumpare ng window ay naaanod mula sa kalahati ng boltahe ng suplay. Ang sitwasyong ito ay sanhi ng output ng kumpara upang utusan ang network ng tulay ng motor na ilipat ang motor sa mga direksyon sa pakaliwa o anticlockwise.
Mga Transistor T1. . . Ang T4 ay naka-configure tulad ng isang network ng tulay upang paganahin ang paglipat ng motor sa pasulong at baligtarin ang mga direksyon depende sa pag-iilaw ng LDR o anggulo ng paglihis ng linya ng laser.
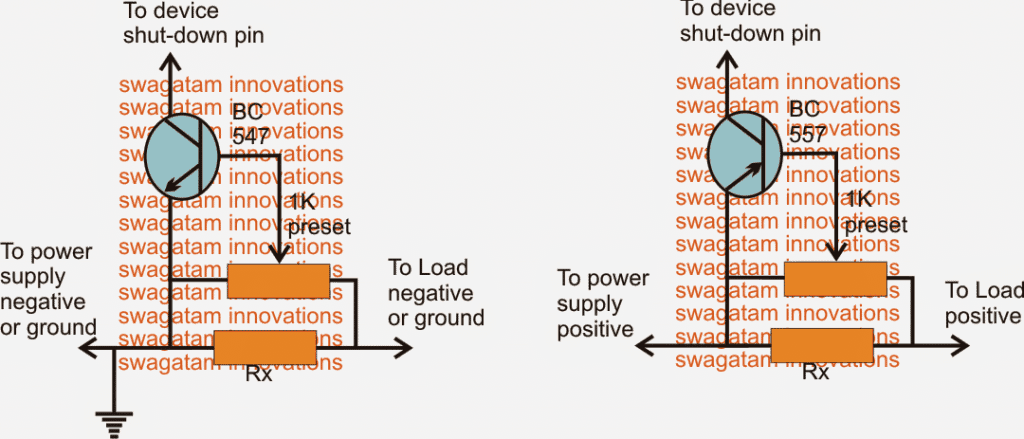
Mga Diode D1. . . Ang D4 ay nakaposisyon upang kanselahin ang mga pagtaas ng boltahe na nabuo sa oras na ang motor ay avtive at tumatakbo. Ang pagpapaandar ng mga Preset potentiometers na P1 at P2 ay para sa pagpapadali ng mga pagsasaayos ng pagkakahanay.
Ang mga ito ay nakaayos upang matiyak na ang motor ay ganap na nakasara at hindi aktibo hangga't ang nauugnay na pares ng LDR ay nakalantad sa eksaktong parehong liwanag ng laser light.
Sabihin nating halimbawa, dahil sa maling pagkakahanay ng tool na kinokontrol ng motor, ang pagkiling ng linya ng laser ay nagiging sanhi ng pagbawas ng ilaw sa LDR R2 kaysa sa LDR R1. Magreresulta ito sa boltahe sa puntong A na tumaas sa itaas ng kalahati ng boltahe ng suplay.
Sa sitwasyong ito, ang output ng A1 op amp ay nagiging mataas, pinipilit na gumana ang mga transistors T1 at T4. Ito naman ang sanhi ng motor na paikutin sa nauugnay na direksyon. Ang aksyon na ito ay awtomatikong binabago ang konektadong tool sa isang tuwid na linya hanggang sa ang pahalang na pagkakahanay ng pagkakahanay ay tumutugma sa katumpakan ng linya ng laser.
Sa kabaligtaran, kung ipinapalagay natin na ang tool ay ikiling ng kabaligtaran na oryentasyon tulad ng pag-iilaw ng LDRs ay kabaligtaran sa tinalakay sa itaas, na sanhi ng boltahe sa punto A na bumaba sa ibaba kalahati ng boltahe ng suplay. Ang kondisyong ito ay nagpapalitaw ng output A2 op amp upang maging mataas na tulad ng T3 at T2 na maging pagpapatakbo.
Nagreresulta ito sa motor na tumatakbo ngayon sa kabaligtaran na direksyon, sa pagtatangka na iwasto ang pagkakahanay ng tool sa nauugnay na direksyon hanggang sa maging perpektong tuwid na sumabay sa linya ng pahalang na linya ng laser.
Pataas / Pababang Button
Ang mga pataas na pindutan para sa paunang pag-preset ng taas ng antas ng espiritu ay maaaring ipatupad sa pamamagitan lamang ng mga kable na switch ng pindutan ng pindutan kahanay sa bawat isa sa mga LDR.
Pag-install ng LDR
Para sa pagkuha ng tamang tugon mula sa mga LDR, ang kaliwang kanang pares ay dapat na mai-install sa loob ng isang tubo tulad ng enclosure na tulad nila na 'nakikita' lamang ang ilaw ng laser, at hindi anumang iba pang ilaw sa paligid.
Ang ideya ay maaaring masaksihan sa sumusunod na imahe:

Dito, makikita natin na ang mga LDR ay nakaposisyon na malapit sa isa't isa, na tinitiyak na kapag ang linya ng laser ay nasa eksaktong sentro, ang ilang bahagi ng parehong pares ng LDR ay naiilawan ng pare-parehong ilaw ng laser.
Ang harap ng enclosure ng LDR ay maaaring sakop ng isang nagkakalat na lens, upang ang pag-iilaw ng laser ay maaaring isabog sa loob ng pantay-pantay na mga LDR.
Nakaraan: Simpleng Anti-Theft Alarm Circuit upang Protektahan ang Mga Mahahalagang Item Susunod: Universal BJT, JFET, MOSFET Tester Circuit