Ang mga motor ng servo ay self-nilalaman na mga mechanical na aparato na ginagamit upang makontrol ang mga machine na may mahusay na katumpakan. Ang mga ito ay matatagpuan sa maraming mga application mula sa mga laruan hanggang sa pang-industriya na awtomatiko. Mayroong iba't ibang uri ng motor, ngunit ang mga motor ng servo ay lalo na idinisenyo para sa tiyak na posisyon ng angular upang makontrol ang mga machine. Karaniwan ang servo motor ay ginagamit upang makontrol ang angular na galaw sa pagitan ng 0 ° hanggang 180 ° at 0 ° hanggang 90 °. Ang prinsipyo ng pagtatrabaho ng servo motor batay sa PWM ( modulate ng lapad ng pulso ) pulso

Servo motor
Servo Motor Interfacing kasama ang 8051 Microcontroller
Ang isang Servo motor ay isa sa pinakakaraniwang ginagamit na motor para sa tumpak na paggalaw ng angular. Ang bentahe ng paggamit ng isang servo motor ay ang anggular na posisyon ng motor na maaaring makontrol nang walang anumang mekanismo ng feedback. Ang servo motor ay karaniwang ginagamit sa komersyal at pang-industriya na aplikasyon . Malawakang ginagamit din ang mga ito tulad ng sa mga system ng drive tulad ng mga robot, eroplano atbp.

Pag-interface ng Servo Motor na may 8051 Microcontroller
Ang prinsipyo at pagpapatakbo ng hobby servo motor ay napaka-simple, binubuo ito ng tatlong mga wire kung saan ang dalawa sa kanila (Itim at pula) na ginamit upang magbigay ng lakas at ang pangatlong kawad ay ginagamit upang magbigay ng signal ng kontrol. Ang mga alon ng Pulse Width Modulated (PWM) ay ginagamit bilang mga signal ng kontrol at ang posisyon ng angular ay tiyak sa pamamagitan ng lapad ng pulso sa control input. Sa artikulong ito, gumagamit kami ng isang servo motor na may anggulo ng pag-ikot mula 0-180 ° at angular na posisyon ay maaaring makontrol sa pamamagitan ng pag-iiba-iba ng mga cycle ng tungkulin sa pagitan ng 1ms hanggang 2ms.
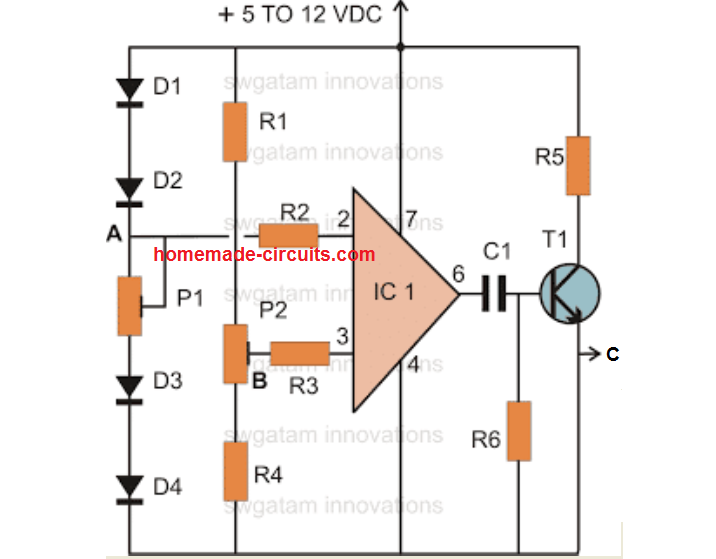
Dito nakikipag-ugnay ang servo motor 8051 microcontroller , ang itim na kawad na konektado sa ground pin at makuha ng motor ang lakas mula sa pulang kawad. Ang kontrol ng servo motor na konektado sa port0 ng 8051 microcontroller. Ang 11.0592MHz crystal oscillator ay ginagamit upang maibigay ang orasan na pulsed sa microcontroller at 22pf ceramic capacitors na ginagamit upang patatagin ang pagpapatakbo ng kristal. Ginagamit ang 10KΩ at 10uf capacitor upang maibigay ang lakas sa pag-reset sa microcontroller.
Pagkontrol ng isang Servo Motor na may mga pag-ikot ng Angle
Ang prinsipyo ng pagtatrabaho ng motor ng servo pangunahin ay nakasalalay sa mga cycle ng tungkulin. Gumagamit ito ng mga alon ng Pulse Width Modulated (PWM) bilang mga signal control. Ang anggulo ng pag-ikot ay resolute ng lapad ng pulso ng control pin. Dito ginagamit ang servo motor para sa anggulo ng pag-ikot mula 0 hanggang 180 degree. Maaari naming makontrol ang tumpak na posisyon ng angular sa pamamagitan ng pag-iba-iba ng pulso sa mga 1ms hanggang 2ms.

Pagkontrol ng isang Servo Motor na may Angle Rotations
Servo Motor Programming Sa mga anggular na pag-ikot
# isama
Sbit servomotor_pin = P0 ^ 5
Walang bisa ang pagkaantala (unsigned int)
Tanggalin ang servo_delay (unsigned int)
Void main ()
{
Servomotor_pin = 0x00
Gawin
{
// lumiko sa 0 °
Servomotor_pin = 0x01
Sevo_delay (50)
Servomotor_pin = 0x00
Pagkaantala (1000)
// lumiko sa 90 degree
Servomotor_pin = 0x01
Sevo_delay (82)
Servomotor_pin = 0x00
Pagkaantala (1000)
// lumipat sa 180 degree
Servomotor_pin = 0x01
Sevo_delay (110)
Servomotor_pin = 0x00
Pagkaantala (1000)
Habang (1)
}
}
Walang bisa ang pagkaantala (unsigned int a)
{
Unsigned int p
Para sa (p = 0p
}
Void servo_delay (unsigned int a)
{
Unsigned int p
Para sa (p = 0p
}
Prinsipyo sa Paggawa ng Servo Motor
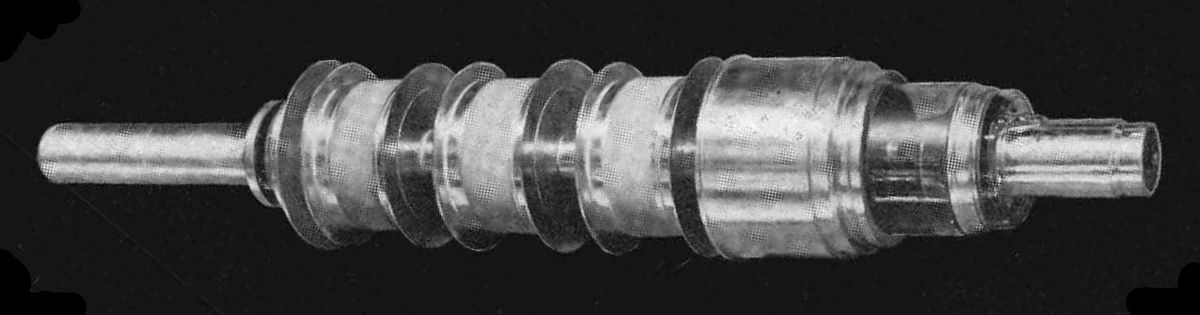
Ang prinsipyo ng pagtatrabaho ng motor ng servo ay higit sa lahat nakasalalay sa 'Fleming left hand rule'. Karaniwan ang mga servo motor ay inangkop sa DC motor , isang sensor ng posisyon, isang pagbabawas ng Gear, at isang elektronikong circuit. Nakamit ng DC motors ang pinapatakbo mula sa isang baterya at tumatakbo sa mataas na bilis at mababang metalikang kuwintas. Pinagsama namin ang baras at lansungan na nakakonekta sa mga motor ng DC pagkatapos ay maaari nating madagdagan at mabawasan ang bilis ng motor nang paunti-unti.
Nararamdaman ng sensor ng posisyon ang lokasyon ng baras mula sa nakapirming posisyon nito at ipinapadala ang impormasyon sa control circuit. Na-decode ng circuit ng control ang mga signal nang naaayon mula sa sensor ng posisyon at inihambing ang aktwal na lokasyon ng mga motor na may ginustong posisyon at naaayon na kinokontrol ang direksyon ng pag-ikot ng DC motor upang makuha ang kinakailangang posisyon. Pangkalahatan ang servo motor ay nangangailangan ng 4.8V hanggang 6 V DC supply.
Ang Pagkontrol ng Servo Motor ng isang Serial Port Command
Ang pangunahing hangarin ng proyektong ito ay upang makontrol ang servo motor sa pamamagitan ng paggamit ng isang personal na computer. Kailangan nito ng isang solong linya ng kontrol mula sa microcontroller at serial input line, mula sa personal computer serial port upang magpadala ng mga utos sa circuit. Ang mapagkukunan ng tiyempo ay ibinibigay ng kristal oscillator. Ang dinisenyo servo motor circuit ay nag-interfaced sa computer sa tulong ng serial cable at level shifter pagkatapos buksan ang software na 'Hyper Terminal' sa PC upang mapili ang comport ng computer.

Pagkontrol ng Servo Motor ng isang Serial Port Command
Sa sandaling maipadala ang mga utos mula sa personal na computer (PC) sa microcontroller sa pamamagitan ng hyper terminal na may antas na shifter, makuha ng microcontroller ang data na ito at ihinahambing ang mga ito sa paunang natukoy na data at bumubuo ng kaukulang signal upang maisaaktibo ang driver ng motor upang ihimok ito sa nais na bilis. Marami mga proyekto ng microcontroller binuo batay sa servo motor tulad ng pagbabalanse ng mga robot, runway helikopter at iba pa. Maaari naming gamitin ang servo motor para sa layunin ng seguridad sa pamamagitan ng pag-interfaced sa wireless camera hangga't maaari naming makontrol ang camera 360 digress.
Self Balancing Robot
Ang robot ng sarili na pagbabalanse ay may kakayahang pagbabalanse mismo sa tulong ng mga motor na servo. Ang robot na ito ay nagtipun-tipon gamit ang mga istruktura, mekanikal at elektronikong sangkap na gumagawa ng kitang-kita na hindi balanseng platform na lubos na naisasailid sa isang pagkakahanay. Ang mga gulong ng robot ay may kakayahang malayang pag-ikot sa dalawang paraan, na hinihimok ng isang servo motor. Ang impormasyon tungkol sa anggulo ng aparato na may kaugnayan sa lupa ay makukuha mula ikiling sensor sa aparato.

Self Balancing Robot
Ang sensor ng ikiling ay maaaring isang accelerometer, gyroscopic sensor, o IR sensor (upang sukatin ang distansya sa lupa). Ang mga sensor ay nagpapadala ng impormasyon sa control unit, na kung saan ay iproseso ang feedback gamit ang isang pangunahing proporsyonal, integral, derivative (PID) na algorithm upang makabuo ng mga signal ng pagkontrol sa posisyon sa pagbibigay ng bayad sa mga servo motor upang balansehin ang aparato.
Mga Application ng Servo Motor
- Ginagamit ito sa Press machine para sa pagputol ng mga piraso sa laki
- Ginagamit ito sa istasyon ng pagpuno ng Sugar
- Ginagamit ito sa mga application ng Pag-label
- Ginagamit ito na sistema ng Pag-pack na may pag-andar ng random na oras
- Ginagamit ito Ginamit sa mga eroplano
Mga kalamangan ng Servo Motor
- Kung ang isang motor ay nakakakuha ng mabibigat na karga ang drayber ay tataas ang kasalukuyang sa likid ng motor bilang pagsisikap na paikutin ang motor. Pangunahin, walang kondisyon sa labas ng hakbang.
- Ang operasyon ng matulin na bilis ay posible ng mga servo motor.
Ito ay tungkol sa prinsipyo ng pagtatrabaho ng servo motor at interfacing sa 8051 microcontroller Bukod dito, para sa anumang tulong na panteknikal patungkol sa artikulong ito o mga proyekto sa electronics na dinisenyo gamit ang mga aparato ng interfacing tulad ng RTC, OLED, flash memory, na-customize na LCD, mga display ng touch screen, at iba pa Maaari kang lumapit sa amin sa pamamagitan ng pagbibigay ng iyong mga komento sa seksyon ng komento sa ibaba.


![Bumuo ng Simple Buck Converter Circuit [Step Down Converter]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)