
Panimula:
Ngayon maraming mga industriya ang gumagamit ng mga robot dahil sa kanilang mataas na antas ng pagganap at pagiging maaasahan at kung saan ay isang malaking tulong para sa mga tao. Ang robotics ng pag-iwas sa balakid ay ginagamit para sa pagtuklas ng mga hadlang at pag-iwas sa banggaan. Ito ay isang autonomous na robot. Ang disenyo ng robot ng pag-iwas sa balakid ay nangangailangan ng pagsasama ng maraming mga sensor ayon sa kanilang gawain.
Ang pagtuklas ng balakid ay ang pangunahing kinakailangan ng autonomous na robot na ito. Nakukuha ng robot ang impormasyon mula sa nakapalibot na lugar sa pamamagitan ng mga naka-mount na sensor sa robot. Ang ilang mga aparato sa sensing na ginamit para sa pagtuklas ng balakid tulad ng mga sensor ng paga, infrared sensor, ultrasonic sensor, atbp. Ang ultrasonic sensor ay pinakaangkop para sa pagtuklas ng balakid at ito ay may mababang gastos at may mataas na kakayahan sa pagsasama.

Pag-iwas sa Balakid sa Robotic Vehicle
Prinsipyo sa Paggawa:
Ang pag-iwas sa balakid robotic na sasakyan gumagamit ng mga ultrasonic sensor para sa mga paggalaw nito. Ang isang microcontroller ng 8051 na mga pamilya ay ginagamit upang makamit ang nais na operasyon. Ang mga motor ay konektado sa pamamagitan ng driver ng motor na IC sa microcontroller. Ang sensor ng ultrasonic ay nakakabit sa harap ng robot.
Kailan man ang robot ay pumupunta sa nais na landas ang ultrasonic sensor ay patuloy na nagpapadala ng mga ultrasonikong alon mula sa ulo ng sensor. Kailanman ang isang balakid ay maunahan nito ang mga ultrasonikong alon ay makikita mula sa isang bagay at ang impormasyong iyon ay ipinapasa sa microcontroller. Kinokontrol ng microcontroller ang mga motor sa kaliwa, kanan, likod, harap, batay sa mga signal ng ultrasonic. Upang makontrol ang bilis ng bawat motor pulse lapad na pagbago ay ginagamit (PWM).

I-block ang Diagram Obstacle Pag-iwas sa Robotic Vehicle
Iba't ibang Sensor na ginamit para sa pag-iwas sa balakid Robotic sasakyan
1. Pagtuklas ng sagabal (IR sensor):
Ginagamit ang mga IR sensor para sa pagtuklas ng balakid. Ang signal signal output ay nagpapadala sa microcontroller. Kinokontrol ng microcontroller ang sasakyan (pasulong / pabalik / huminto) sa pamamagitan ng paggamit ng DC motor na nakalagay sa sasakyan. Kung may anumang balakid na nakalagay inline ang IR sensor ay nabigong makatanggap ng mga light ray at nagbibigay ng mga signal sa microcontroller. Ititigil kaagad ng microcontroller ang sasakyan at ang sirena ay parating. Matapos ang isang minuto ay susuriin ng robot ang katayuan ng landas kung ang isang balakid ay tinanggal ang robot ay gumagalaw nang malayo sa salita ay babalik ang robot upang ilipat ang lugar ng pagsisimula. Nakita ng sensor ang mga bagay sa pamamagitan ng paglabas ng isang maikling pagsabog ng ultrasonic at pagkatapos ay pakikinig para sa eco. Sa ilalim ng kontrol ng isang host microcontroller, ang sensor ay nagpapalabas ng isang maikling pagsabog ng 40 kHz. Ang mga pakikipagsapalaran na pagsabog o paglalakbay sa pamamagitan ng hangin ay tumama sa isang artikulo at pagkatapos nito ay tumalbog muli sa sensor. Ang sensor ay nagbibigay ng isang output pulse sa host na magwawakas kapag nakita ang echo samakatuwid ang lapad ng isang pulso sa susunod ay kinuha sa pagkalkula ng isang programa upang magbigay ng mga resulta sa distansya ng object.
dalawa. Pagtuklas ng landas (sensor ng kalapitan):
Ang normal na sanhi ng parehong mga sensor na nagbibigay ng mga alituntunin at sundin ng robot na dumidiretso sa landas. Kapag natapos ang linya sa oras na iyon ang robot ay bumaliktad sa 180 at ibabalik ang parehong lugar.

Pagiging On-Line
Ginagamit ang mga sensor ng kalapitan para sa pagtuklas ng landas. Kapag ang kanang sensor ay hindi napansin sa linya ng curve, pinapagana ng microcontroller ang kaliwang motor upang kumaliwa hanggang sa signal mula sa kanang sensor. Sa sandaling ang signal ay nakita ng tamang sensor, ang dalawang motor ay naaktibo upang magpatuloy. Kapag natapos ang linya sa oras na iyon ang robot ay bumaliktad sa 180 at ibabalik ang parehong lugar.

Nawawalan ng Linya
3. Ultrasonic Sensor:
Ginagamit ang sensor ng ultrasonic para sa pagtuklas ng balakid. Ang sensor ng ultrasonic ay nagpapadala ng mga ultrasonic alon mula sa ulo ng sensor at muling natatanggap ang mga ultrasonic na alon na nasasalamin mula sa isang bagay.
Maraming mga application ang gumagamit ng mga ultrasonic sensor tulad ng mga sistema ng alarma ng pagtuturo, awtomatikong mga bukas ng pinto, atbp. Ang sensor ng ultrasonic ay napaka-compact at may napakataas na pagganap.

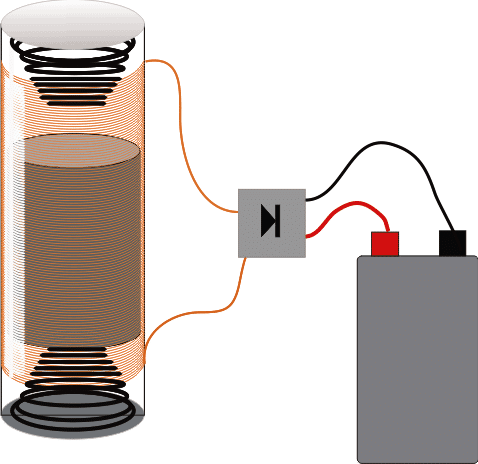
Pangkalahatang Diagram ng Ultrasonic Sensor
Prinsipyo sa Paggawa:
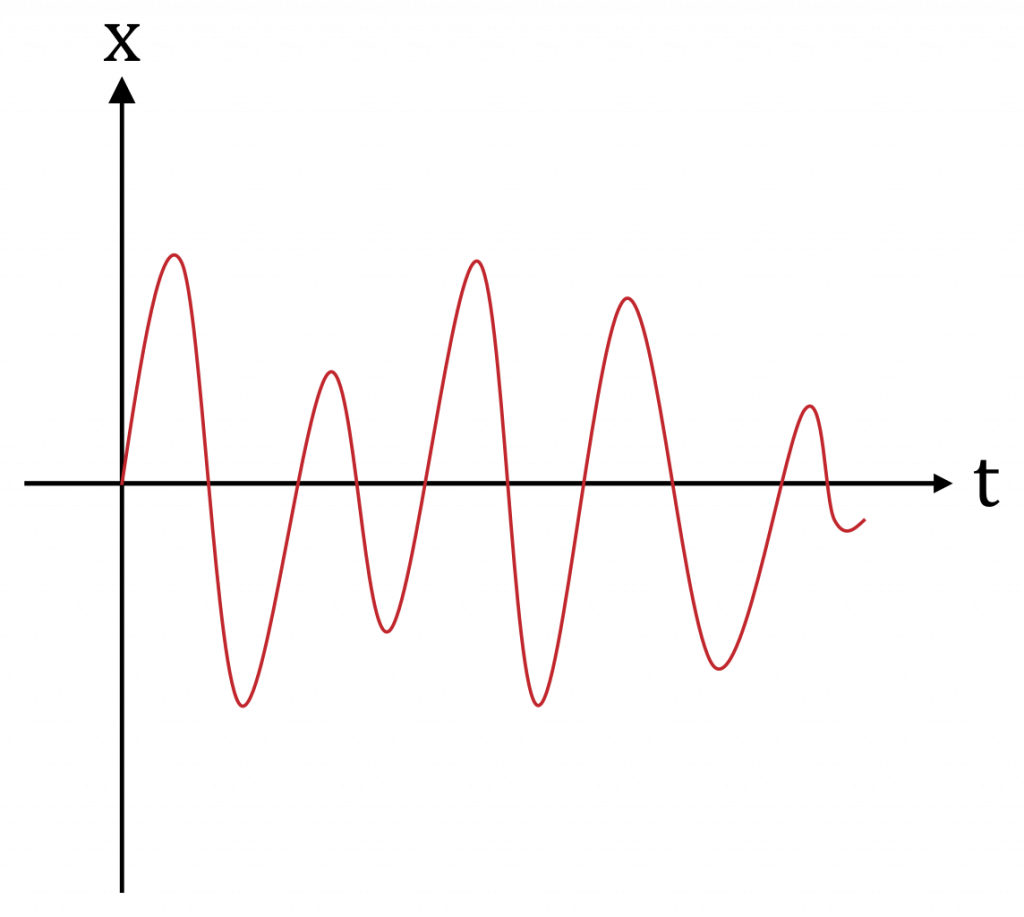
Ang ultrasonic sensor ay nagpapalabas ng maikli at mataas na dalas ng signal. Ang mga ito ay nagpapalaganap sa hangin sa bilis ng tunog. Kung na-hit nila ang anumang bagay, pagkatapos ay sumasalamin sila ng isang echo signal sa sensor. Ang sensor ng ultrasonic ay binubuo ng isang multivibrator, naayos sa base. Ang multivibrator ay isang kumbinasyon ng isang resonator at isang vibrator. Naghahatid ang resonator ng alon ng ultrasonic na nabuo ng panginginig ng boses. Ang sensor ng ultrasonic ay binubuo ng dalawang bahagi ng emitter na gumagawa ng isang 40 kHz sound wave at nakita ng detector ang isang 40 kHz na alon ng tunog at nagpapadala ng isang de-koryenteng signal pabalik sa microcontroller.

Prinsipyo sa Pagtatrabaho ng Ultrasonic
Pinapayagan ng sensor ng ultrasonic ang robot na halos makita at makilala ang isang bagay, maiwasan ang mga hadlang, sukatin ang distansya. Ang saklaw ng operating ng ultrasonic sensor ay 10 cm hanggang 30 cm.
Pagpapatakbo ng ultrasonic sensor:
Kapag ang isang de-koryenteng pulso ng mataas na boltahe ay inilapat sa ultrasonic transducer kumikinig ito sa isang tukoy na spectrum ng mga frequency at bumubuo ng isang pagsabog ng mga alon ng tunog. Tuwing may anumang sagabal na maunahan ng ultrasonic sensor ang mga sound wave ay makikita sa anyo ng echo at bumubuo ng isang electric pulse. Kinakalkula nito ang oras na ginugol sa pagitan ng pagpapadala ng mga sound wave at pagtanggap ng echo. Ang mga pattern ng echo ay ihinahambing sa mga pattern ng mga sound wave upang matukoy ang kalagayan ng napansin na signal.
Tandaan: Ang tatanggap ng ultrasonic ay dapat makakita ng signal mula sa ultrasonic transmitter habang ang mga transmisyon ng alon ay tumama sa bagay. Papayagan ng kombinasyon ng dalawang sensor na ito ang robot na makita ang bagay sa daanan nito. Ang sensor ng ultrasonic ay nakakabit sa harap ng robot at ang sensor na iyon ay makakatulong din sa robot na mag-navigate sa bulwagan ng anumang gusali.
Mga aplikasyon ng Ultrasonic Sensor:
- Awtomatikong pagbabago ng mga signal ng trapiko
- Intruder system ng alarma
- Ang pagbibilang ng mga instrumento sa pag-access ay lumilipat sa mga metro ng paradahan
- Bumalik sonar ng mga sasakyan
Mga tampok ng Ultrasonic Sensor:
- Compact at magaan ang timbang
- Mataas na pagkasensitibo at mataas na presyon
- Mataas na pagiging maaasahan
- Pagkonsumo ng kuryente na 20mA
- Pulse in / out na komunikasyon
- Makitid na anggulo ng pagtanggap
- Nagbibigay ng eksaktong, hindi pagtantya na mga pagtatantya ng paghihiwalay sa loob ng 2cm hanggang 3m
- Ang LED point ng pagsabog ay nagpapakita ng mga pagtatantya sa pagsulong
- Ginagawa ng 3-pin header na simple upang ikonekta ang paggamit ng isang link ng pag-unlad ng servo
Mga Aplikasyon ng Pag-iwas sa Obstacle sa Robotic Vehicle:
- Lalo na ang mga aplikasyon ng militar
- Maaari itong magamit para sa mga giyera sa lungsod
Ngayon malinaw na nakakuha ng isang ideya tungkol sa konsepto ng robotic na sasakyan gamit ang isang ultrasonic sensor ng pagtuklas ng balakid kung ang karagdagang mga query sa paksang ito o ang konsepto ng mga de-koryenteng at elektronikong proyekto ay iniiwan ang mga komento sa ibaba.
Pagkikilala sa kumuha ng larawan:
- Pangkalahatang Diagram ng Ultrasonic Sensor ni Letsmakerobots
- Prinsipyo sa Pagtatrabaho ng Ultrasonic Sensor ni Microsonic






{kind=link}