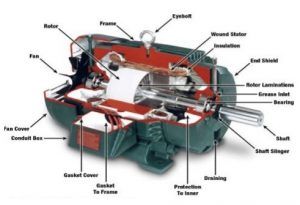
Isang electric machine na nagko-convert ng enerhiya sa kuryente sa mekanikal na enerhiya ay tinatawag na isang de-kuryenteng motor. Ang una at pinakamahalagang electric motor ay isang simpleng aparato ng electrostatic na nilikha ni Scottish monghe Andrew Gordon noong 1740s. Ngunit noong 1821, ipinakita ni Michael Faraday ang pagbabago ng elektrikal na enerhiya sa mekanikal na enerhiya.
Ang mga de-kuryenteng motor ay pangunahing naiuri sa dalawang kategorya: AC motor at DC motor . Muli, ang bawat kategorya ay nahahati sa maraming uri. Maraming mga karga tulad ng panghalo, gilingan, tagahanga, atbp., Madalas na ginagamit na gamit sa bahay na kung saan maaari kaming makahanap ng iba't ibang mga uri ng motor at ito ay maaaring mapatakbo sa iba't ibang bilis na may bilis ng pagkontrol sa pagkakaloob ng mga motor. Sa artikulong ito, tatalakayin namin ang tungkol sa isa sa mga pangunahing uri ng DC motors, katulad Stepper motor at ang kontrol nito gamit ang microcontroller.
Stepper Motor
Isang kasabay at walang motor na DC motor na nagko-convert ng mga de-kuryenteng pulso sa mga paggalaw ng makina at sa gayon, umiikot na hakbang sa isang tiyak na anggulo sa pagitan ng bawat hakbang para sa pagkumpleto ng isang buong pag-ikot ay tinatawag na Stepper Motor. Ang anggulo sa pagitan ng mga hakbang ng pag-ikot ng stepper motor ay tinawag na anggulo ng stepper ng motor.

Stepper Motor
Ang mga stepper motor ay inuri sa dalawang uri ayon sa kanilang paikot-ikot: Unipolar Stepper Motors at Bipolar Stepper Motors. Ang unipolar stepper motor ay madalas na ginagamit sa maraming mga aplikasyon dahil sa kadalian ng operasyon kumpara sa bipolar stepper motor. Ngunit may iba't ibang uri ng mga motor na stepper tulad ng Permanenteng Magnet Stepper Motor, Variable Reluctance Stepper Motor, at Hybrid Stepper Motor.
Pagkontrol sa Stepper Motor
Ang stepper motor ay maaaring makontrol sa iba't ibang mga diskarte, ngunit dito tinatalakay namin ang stepper motor control gamit ang isang Atmega microcontroller . Ang 89C51 ay isang microcontroller ng 8051 pamilya ng microcontroller .

I-block ang Diagram ng Stepper Motor Control
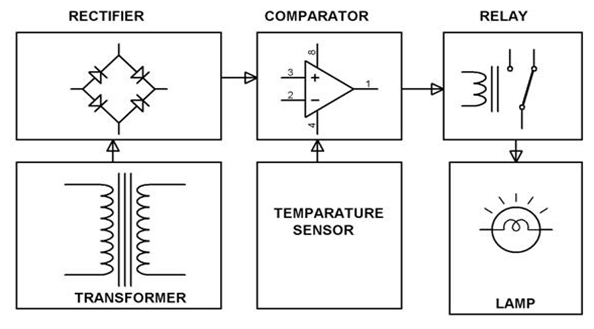
Ang diagram ng block ng isang kontrol ng stepper motor na gumagamit ng isang 8051 microcontroller ay ipinapakita sa figure na may supply ng kuryente , microcontroller, stepper motor at control blocks blocks.
2 Mga Paraan Upang Magdisenyo ng Stepper Motor Control Circuit
Ang stepper motor controller ay dinisenyo gamit ang 8051 microcontrollers at switching circuit para sa pagkontrol ng bilis ng stepper motor. Ang control switch circuit ay maaaring idisenyo sa pamamagitan ng paggamit switch ng transistor o sa pamamagitan ng paggamit ng stepper motor controller IC tulad ng ULN2003 kapalit ng mga transistors.
1. Kontrolin ang Circuit Gamit ang Stepper Motor Controller IC
Ang unipolar stepper motor ay maaaring paikutin sa pamamagitan ng pag-enerhiya ng mga coiler ng stator sa isang pagkakasunud-sunod. Ang pagkakasunud-sunod ng mga signal na ito ng boltahe na inilapat sa mga motor coil o lead ay sapat na upang himukin ang motor at samakatuwid, walang kinakailangang circuit ng driver para sa pagkontrol sa direksyon ng kasalukuyang mga stator coil.

Stepper Motor Control gamit ang IC
Ang two-phase-stepper motor ay binubuo ng apat na mga wire sa dulo na konektado sa mga coil at dalawang karaniwang mga wire na konektado sa dalawang dulo ay humahantong sa pagbuo ng dalawang mga phase. Ang mga karaniwang point at end point ng dalawang phase ay konektado sa ground o Vcc at mga microcontroller pin, ayon sa pagkakabanggit. Para sa pag-ikot ng motor, ang mga endpoint ng dalawang yugto ay dapat palakasin. Pangunahin ang isang boltahe ay inilalapat sa unang dulo ng phase1, at ang karagdagang boltahe ay inilalapat sa unang dulo ng phase2, at iba pa.
Ang stepper motor ay maaaring patakbuhin sa iba't ibang mga mode tulad ng Wave Drive Stepping Mode, Full Drive Stepping Mode at Half Drive Stepping Mode.
Wave Drive Stepping Mode
Sa pamamagitan ng pag-uulit ng pagkakasunud-sunod sa itaas, ang motor ay maaaring paikutin sa mode na paglalakad ng alon-drive alinman sa isang pakaliwa o anticlockwise na direksyon batay sa pagpili ng mga end point. Ipinapakita ng talahanayan sa ibaba ang pagkakasunud-sunod ng yugto ng signal para sa wave-drive-stepping mode.


Wave Drive Stepping Mode
Buong Mode ng Stepping Step
Nakaka-Energize ang dalawang mga endpoint ng magkakaibang mga yugto nang sabay-sabay nakakamit ang isang full-drive-stepping mode. Ipinapakita ng talahanayan ang pagkakasunud-sunod ng yugto ng signal para sa full-drive -stepping mode.


Buong Mode ng Stepping Step
Half Drive Stepping Mode
Ang kumbinasyon ng mga hakbang ng alon at full-drive-stepping mode ay nakakamit ang isang mode na half-drive-stepping. Kaya, sa mode na ito, ang hakbang sa paghakbang ay nahahati sa kalahati. Ipinapakita ng talahanayan ang pagkakasunud-sunod ng yugto ng signal ng isang mode na half-drive-stepping.


Half Drive Stepping Mode
Sa pangkalahatan, ang anggulo ng paghakbang ay nakasalalay sa resolusyon ng stepper motor. Ang laki ng mga hakbang at ang direksyon ng pag-ikot ay direktang proporsyonal sa bilang at pagkakasunud-sunod ng pagkakasunud-sunod ng pag-input. Ang bilis ng pag-ikot ng baras ay nakasalalay sa dalas ng pagkakasunud-sunod ng pag-input. Ang metalikang kuwintas at ang bilang ng mga magnet na magnetized sa isang oras ay proporsyonal.
Ang stepper motor ay nangangailangan ng kasalukuyang 60mA, ngunit ang maximum na kasalukuyang rating ng Atmega microcontroller AT89C51 ay 50mA. Kaya, isang stepper-motor-controller na ICisuse upang mai-interface ang stepper motor gamit ang microcontroller para sa paglilipat ng mga signal.
2. Kontrolin ang Switch Circuit Gamit ang Transistors
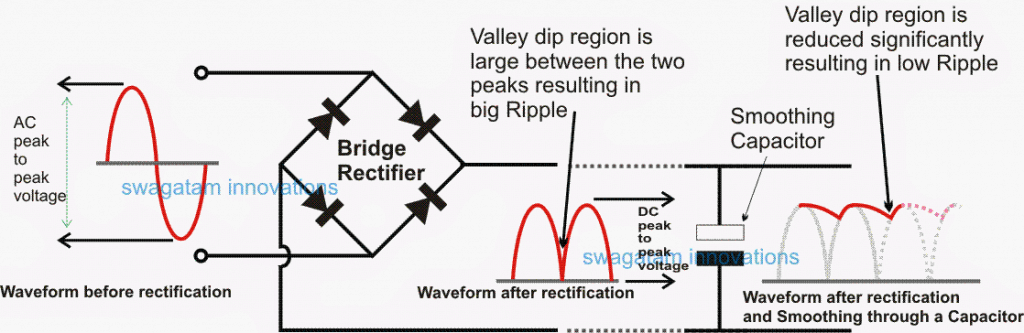
Ang suplay ng kuryente sa circuit ay maaaring ibigay sa pamamagitan ng pagbaba ng boltahe mula 230V hanggang 7.5V gamit ang isang step-down transpormer, at pagkatapos pagwawasto ng isang tulay na tagatama na may mga diode . Ang naayos na output na ito ay pinakain sa isang filter capacitor, at pagkatapos ay dumaan sa regulator ng boltahe. Ang kinokontrol na output ng 5V ay nakuha mula sa regulator ng boltahe. Ang pag-reset ng pin9 ay konektado sa pagitan ng capacitor at resistor.

Stepper Motor Control Circuit gamit ang Transistor
Sa pangkalahatan, ang stepper motor ay binubuo ng apat na coil tulad ng ipinakita sa figure. Kaya, upang magmaneho ng motor, kinakailangan ang apat na mga circuit ng motor-driver. Sa halip na gamitin ang stepper motor controller IC upang himukin ang motor, ang apat na transistors ay konektado bilang mga driver circuit sa 21, 22, 23 at 24 na pin ng microcontroller, ayon sa pagkakabanggit.
Kung ang mga transistors ay nagsisimula ng pagpapadaloy, pagkatapos ay lilikha ng isang magnetic field sa paligid ng likid na sanhi ng pag-ikot ng motor. Ang bilis ng stepper motor ay direktang proporsyonal sa dalas ng pag-input ng pulso. Ang isang kristal oscillator ay konektado sa mga pin 18 at 19 upang magbigay ng dalas ng orasan ng microcontroller na mga 11.019MHz.
Ang oras ng pagpapatupad ng anumang pagtuturo ay maaaring kalkulahin gamit ang formula sa ibaba
Oras = ((C * 12)) / f
Kung saan ang C = bilang ng ikot
At F = dalas ng kristal
Ang isa sa application based circuit na gumagamit ng isang stepper motor para sa umiikot na solar panel ay inilarawan sa ibaba.
Control ng Stepper Motor Gamit ang Programmed 8051 Microcontroller
Proyekto sa Sun Tracking Solar Panel ay inilaan upang makabuo ng maximum na dami ng enerhiya sa pamamagitan ng awtomatikong pagsasaayos ng solar panel. Sa proyektong ito, ang isang stepper motor na kinokontrol ng isang naka-program na microcontroller ng 8051 na pamilya ay nakakonekta sa solar panel upang mapanatili ang mukha ng mga solar panel na laging patayo sa araw.

Control ng Stepper Motor Paggamit ng Microcontroller ng Edgefxkits.com
Ang naka-program na microcontroller bumubuo ng stepped electrical pulses sa regular na agwat sa stepper motor para sa pag-ikot ng solar panel. Ginamit ang driver IC upang himukin ang stepper motor dahil hindi maibigay ng controller ang mga kinakailangan sa kuryente ng motor.
Mangyaring iwanan ang iyong mga mungkahi, puna at query sa pamamagitan ng pag-post ng mga komento sa seksyon ng komento sa ibaba. Gagawin namin ang aming makakaya upang matulungan kang teknikal tungkol sa artikulong ito at pagbuo ng mga proyektong elektrikal at electronics gamit ang stepper motor.